
CRPS封面文章!浙大李铁风团队无线水下软体机器人
文章来源 机器人大讲堂
近日,浙江大学交叉力学中心李铁风团队在Cell Press细胞出版社期刊Cell Reports Physical Science上发表了一篇研究论文,题为“A jelly-like artificial muscle for an untethered underwater robot”。论文被选为Cell Reports Physical Science 5月封面文章。
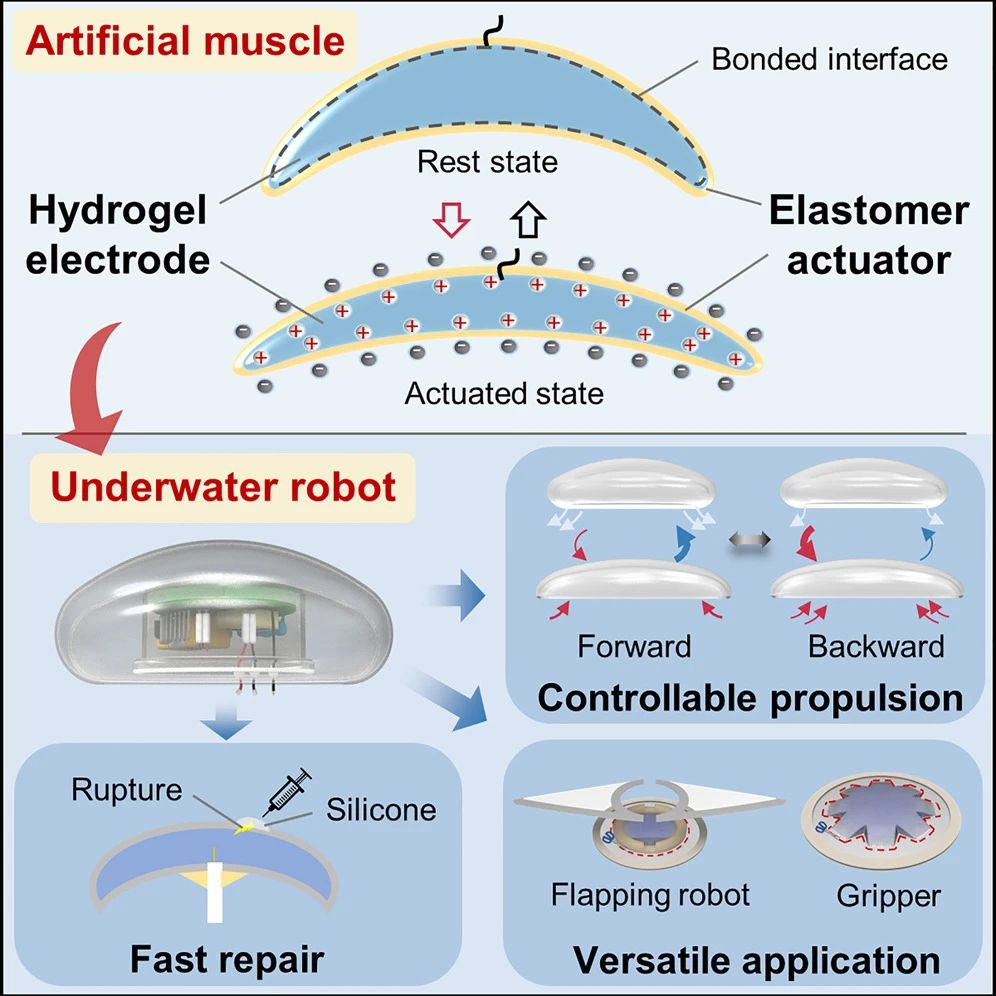
封面图片展示了新型仿水母人工肌肉在软体机器人中的三种创新应用:水母型水下机器人、扑动型水下机器人及水下软体抓手。
团队提出了一种极其柔软(弹性模量为66.9 kPa)且含水量高达83.3%的人工肌肉设计。该人工肌肉能够对电刺激立即做出反应,并提供水下推进力。通过简单调整电压信号可以改变推进方向,并且可以通过修复快速恢复电机电故障后的性能。通过搭载电源系统,可以组装出无需缆线的机器人,最大速度达到0.91 cm/s(每秒0.3个体长),使用500 mAh锂离子电池的续航时间可达15.7分钟。
▍一项革新技术,柔软与力量的融合
水下机器人技术的发展使机器能够在深海和极端环境中工作,为人类探索以前无法到达的领域提供了可能。最近关于由人工肌肉驱动的机器人的研究展示了其在静音、效率和适应性方面的优势。虽然已经开发了多种用于水下机器人的人工肌肉,但其实际应用仍受限于如缆线供电系统、结构不灵活和低驱动频率等问题。
例如,压力驱动的肌肉(包括液压和气动变体)在柔软性、效率和水下伪装方面表现优异,但需要泵送系统、稳定的密封和低频率问题。其他缺点还包括热驱动肌肉的有限移动性和控制能力、生物工程材料无法在实验室外进行实验的可能性较小,以及离子交换聚合物金属复合材料(IPMCs)的低驱动频率和推力。因此,具有快速驱动和便携电源系统的多功能且适应水环境的软体人工肌肉是高度需求的。
介电弹性体(DEs)在李铁风团队最近的工作中表现出了快速的水下电响应速度。然而,这些材料的实际应用仍然存在一些局限性。首先,要求刚性框架将材料的变形转换为所需的机器人推进力,限制了机器人的设计空间和功能。其次,其光学和声学性能通常由于电压应用所需的不透明电极而与水环境不兼容。最后,DEs容易因机械或电气故障而开裂,影响机器人系统的寿命。相反,水凝胶具有柔软和水感的成分,能够在水环境中表现出良好的适应性和伪装能力,但由于水分膨胀导致的驱动速度慢和性能不稳定问题,限制了其应用。
研究团队认为,结合这两种材料的优点,可以在提高透明度和柔软性的同时,解决水凝胶的慢响应和不稳定性问题。此外,两种材料之间的牢固界面粘结机制可能使结构可修复,为水下人工肌肉研究提供创新方向。
▍人工肌肉的设计与实现
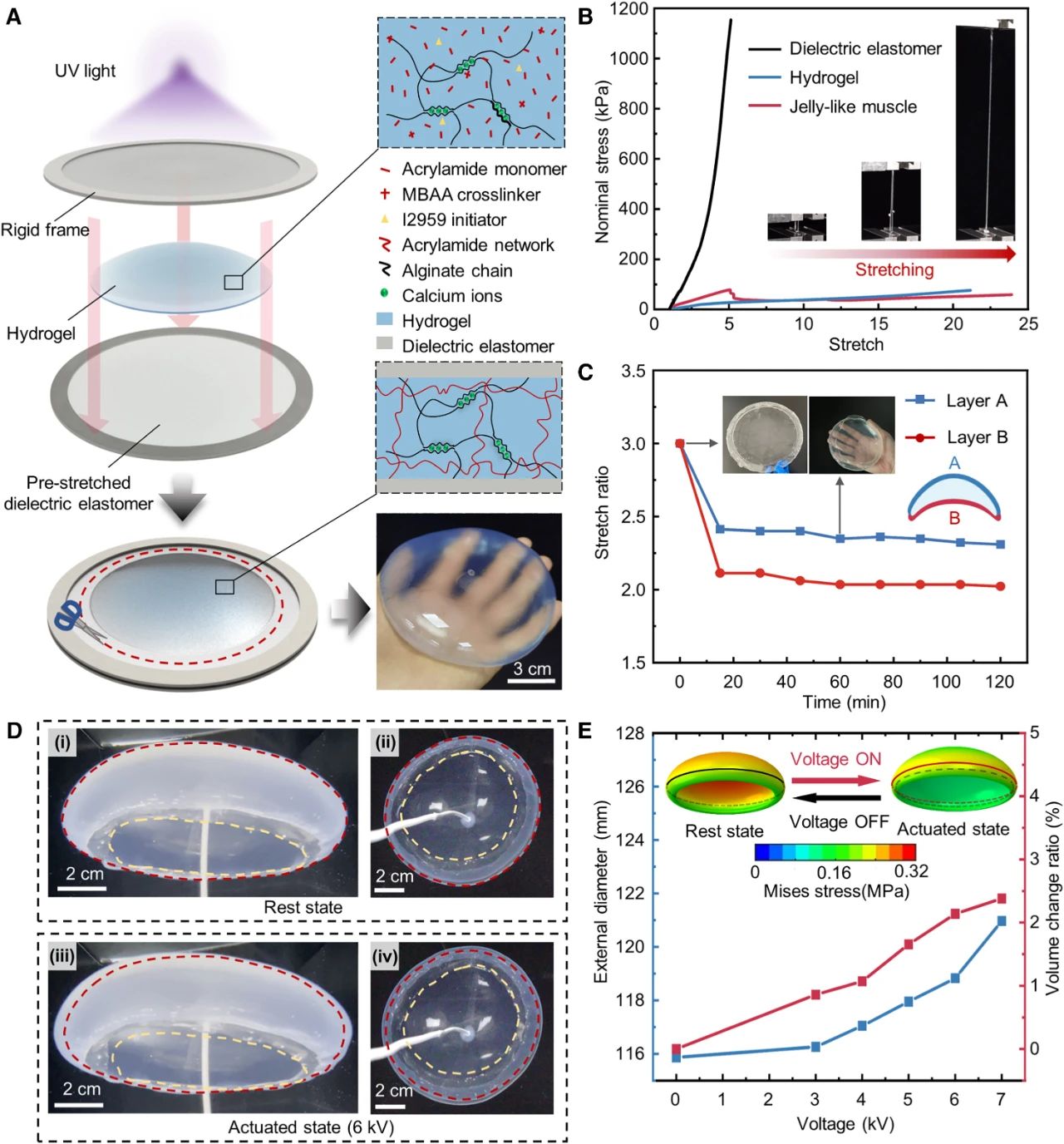
水母是一种具有高含水量(超过95%)和极度柔软(弹性模量在10–100 kPa范围内)的生物。受其启发,研究团队设计了一种人工肌肉,结构类似于水母的解剖构造:一种柔软的水凝胶被夹在两层预拉伸(3×3)的DE膜之间。
团队制造的人工肌肉使用含水量为87.7%的水凝胶,最终在计入DE的重量后,整体含水量为83.3%。这一含水量高于大多数现有的水下人工肌肉,并且其弹性模量为66.9 kPa,类似于水母的柔软度。该设计不仅提高了肌肉的柔软性和适应性,还增强了其在水环境中的透明度和伪装能力。
人工肌肉的制造过程包括以下几个步骤:
预拉伸DE膜:首先,将介电弹性体(DE)膜在预定方向上预拉伸至3倍长度,并固定在框架上。这一步骤旨在增加DE膜的柔韧性和反应速度。
制备水凝胶:采用高含水量的水凝胶材料,通过模具成型的方法制备出所需形状的水凝胶。
夹层结构组装:将预拉伸的DE膜和水凝胶层压在一起,形成DE-水凝胶-DE的夹层结构,并确保水凝胶与DE膜之间的牢固粘结。
电极涂覆:在DE膜的外表面涂覆导电电极,以便在电刺激下激活肌肉。电极材料需要具备良好的导电性和柔韧性,以适应DE膜的变形。
密封和保护:最后,对整个夹层结构进行密封处理,防止水凝胶脱水和外界污染。
通过以上步骤,团队成功制造出了一种柔软、透明且具有快速电响应能力的人工肌肉。
▍性能测试与分析
团队对人工肌肉进行了系列电响应速度测试。结果表明,该肌肉在电刺激下能够在毫秒级别内迅速收缩和扩展。这一快速响应特性使其在水下推进和方向控制方面表现出色。
为了评估人工肌肉的推进性能,团队设计了一种简单的水下机器人原型,并在水槽中进行了推进实验。实验结果显示,机器人能够以0.91 cm/s的最大速度(相当于每秒0.3个体长)前进,并且能够通过调整电压信号灵活改变推进方向。
人工肌肉在多次电机电故障后仍能保持其性能,显示出良好的修复能力。这一特性得益于DE膜和水凝胶之间的牢固界面粘结机制,使得肌肉能够在机械和电气损伤后迅速恢复。
团队还测试了机器人在不同电池容量下的续航能力。使用500 mAh锂离子电池时,机器人能够连续运行15.7分钟。通过优化电源系统和电池容量,未来可以进一步延长机器人的续航时间。
▍应用前景展望
人工肌肉的灵活性使得它在各种复杂的水下环境中都能发挥作用。通过定制肌肉的形状和结构,可以制造出适用于不同任务的水下机器人。例如,在海洋探测领域,人工肌肉机器人可以深入到狭窄的海底缝隙中,进行详细的地形勘测和样本采集。
人工肌肉的高透明度和伪装能力,使其可以在环境监测中表现出色。机器人可以在不干扰水生生态系统的情况下,进行水质检测和污染源追踪。例如,在污染水体中,人工肌肉机器人可以隐蔽地收集水样和污染物数据,为环境保护提供重要信息。
人工肌肉模拟水母的运动方式,使其可以成为研究海洋生物行为的理想工具。机器人可以帮助科学家更好地理解海洋生物的生态和行为。例如,通过模拟水母的运动,研究人员可以观察水母在不同环境条件下的反应,从而揭示其生存策略和习性。
人工机器人在水下救援和维修任务中也有着巨大的潜力。其柔软性和高灵活性使其能够在复杂、狭窄的水下环境中自由移动。例如,在海底管道维修中,人工肌肉机器人可以进入难以接近的区域,进行精细操作和修复工作。
▍结语
本研究中人工肌肉的开发为水下机器人技术带来了新的可能性。其极高的柔软性、透明度和快速电响应能力,使其在各种水下应用中表现出色。未来,通过进一步优化材料和结构设计,该技术有望在更多领域发挥重要作用。
此次新型人工肌肉的出现不仅解决了现有人工肌肉在水下应用中的诸多瓶颈,也为未来水下机器人技术的发展指明了方向。随着技术的不断进步和应用场景的不断拓展,我们有理由相信,人工肌肉将在不久的将来成为水下机器人领域的重要组成部分,为人类探索和保护海洋环境做出更大的贡献。