
颠覆传统操控!解密美国东北大学机器蛇如何在复杂地形中灵活表现
文章来源 中国机器人网
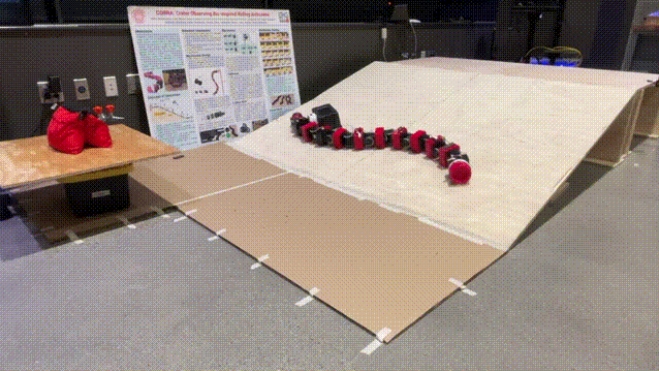
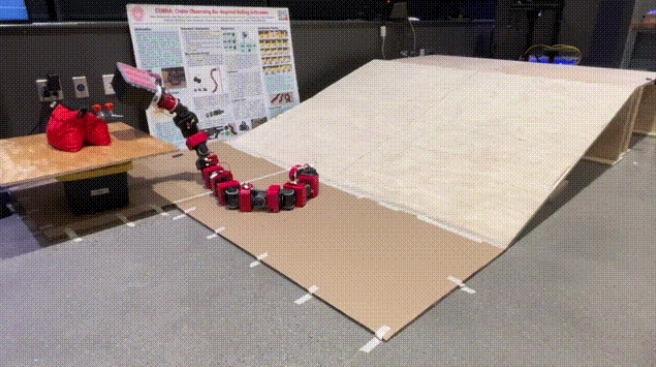
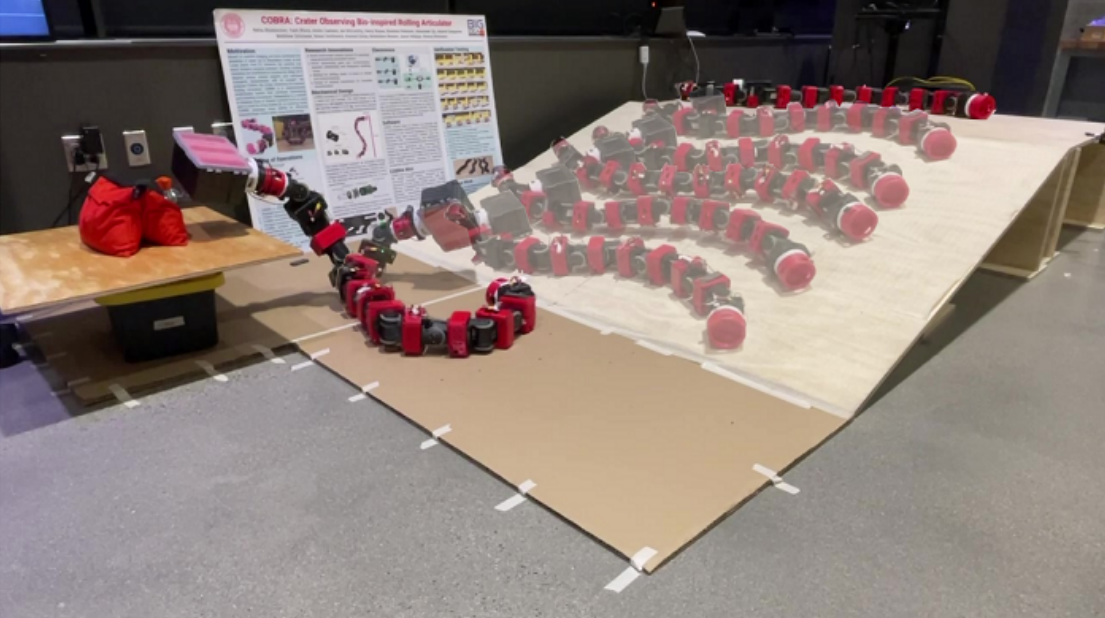
你没看错,这个不断翻滚上坡的条状物是一个蛇形机器人。
在人们的印象中,大多数蛇形机器人似乎无法像许多轮式和腿式机器人那样抓取和操作物体。
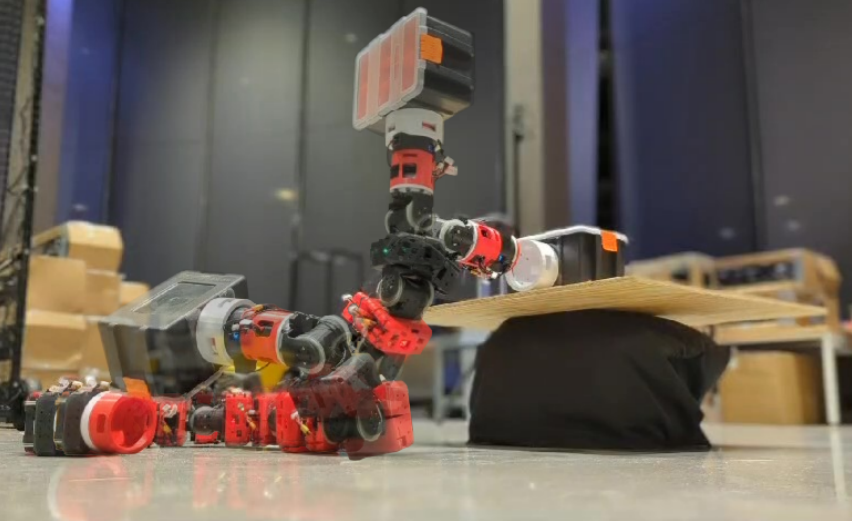
不过这个机器人可以不太费力地抓起物体:
放下来也是轻轻松松:

据探索前沿科技边界,传递前沿科技成果的X-robot投稿,这是由Alireza Ramezani教授监督的美国马萨诸塞州东北大学的研究团队最近发布的最新研究成果,可以让蛇形机器人COBRA同时移动和操作物体。
▍COBRA的结构与功能
COBRA由11个高灵活性的关节组成,其设计灵感直接来源于蛇的自然运动机制。
其头部模块内置了强大的计算单元、通讯模块和惯性测量单元(IMU),为其提供了所需的导航和控制能力。

中间的关节模块则配备了电机和电池,保证了COBRA的长时间自主运行能力。尾部模块根据任务需求可以灵活更换不同的电子设备,使其适应各种任务要求。
COBRA的头部还配备了一个独特的抓取装置,由电机驱动,能够灵活地扩展或收缩,实现对物体的精准抓取和操作。
这种设计使COBRA在进行物体操控时,具备了类似人手的灵活性和精准度。
▍非冲击接触隐式运动优化
COBRA的运动控制依赖于复杂的数学模型和优化算法,其核心是非冲击接触隐式路径规划。
这种方法通过优化算法解决物体操控过程中涉及的接触力和路径规划问题,确保运动轨迹的平滑性和稳定性。优化算法能够计算出在不同接触条件下的最优运动轨迹。
这种优化方法的一个关键优势是处理非冲击接触力,这在物体操控中尤为重要。
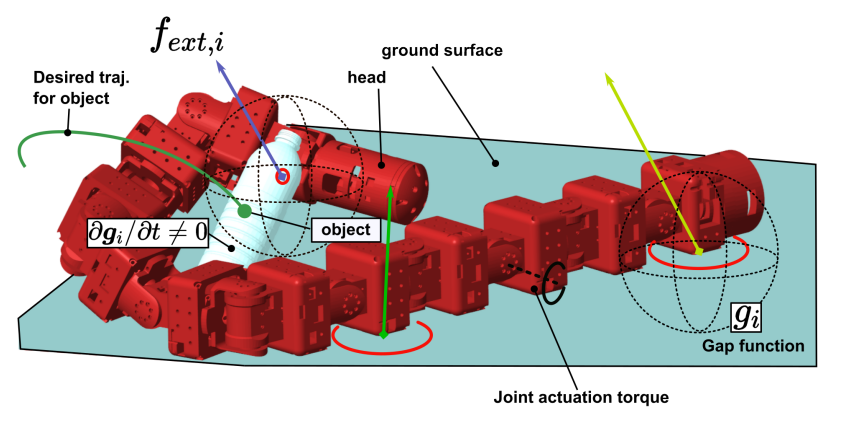
例如,当COBRA需要将一个物体从地面抬起并放置到一个高台上时,优化算法确保接触力的平滑过渡,避免物体因剧烈碰撞而损坏。
在COBRA的运动控制中,正常锥包含条件是一个重要的数学概念。这种条件确保接触力和接触速度之间的正确关系。
例如,当COBRA的头部抓取一个物体时,接触力的方向和大小必须与物体的移动方向和速度相匹配。通过这种方式,COBRA能够实现精确的物体操控,避免物体在移动过程中滑落或损坏。
▍COBRA的实际应用
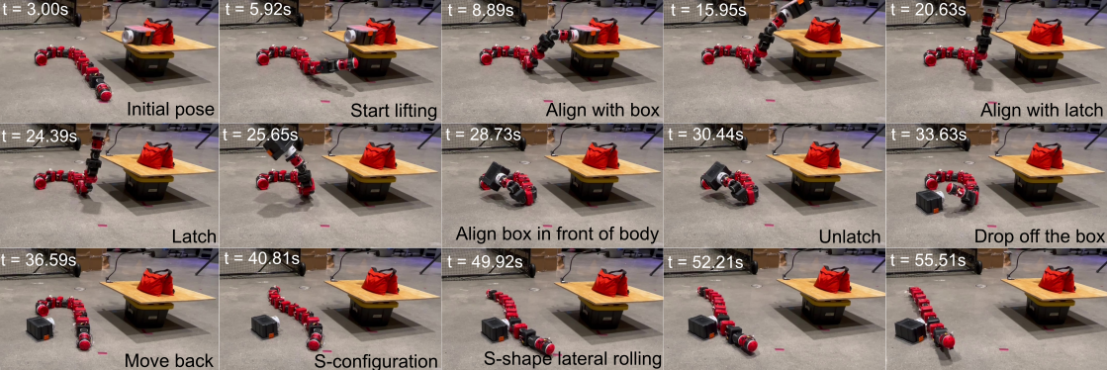
为了验证COBRA的物体操控能力,研究团队进行了多个高仿真模拟和实际实验。在这些实验中,COBRA展示了其卓越的物体操控能力。
例如,在一个实验中,COBRA成功地将一个物体从地面抬起并放置到0.3米高的台子上。这个过程不仅展示了COBRA的抓取能力,还展示了其在复杂路径规划中的精确控制。
研究团队通过Matlab Simulink平台开发了高仿真模拟环境。在这个环境中,研究人员可以研究地面接触力和物体交互等难以在实际机器人实验中直接观察的问题。
通过这种方式,团队能够优化COBRA的运动控制算法,提高其在真实环境中的表现。

COBRA不仅在平坦地面上表现出色,在复杂地形中同样表现出色。它能够在沙地、草地甚至是岩石地形上灵活移动。
这得益于其高度灵活的关节设计和非冲击接触隐式运动优化算法。
在一个模拟实验中,COBRA被要求在一片松软的沙地上移动并搬运一个小箱子。尽管地形不稳定,COBRA通过调整自身的关节运动,实现了稳定的移动和物体操控。
这种能力使得COBRA在实际应用中具有广泛的前景。例如,在灾后救援中,COBRA可以进入废墟中搜索并搬运物体;在农业中,COBRA可以在农田中移动,进行作物的细致处理和采摘;在工业环境中,COBRA可以在复杂的管道和设备中进行维护和检修。
▍未来发展方向
尽管COBRA已经展示了其在物体操控和复杂地形移动方面的巨大潜力,但其发展依然充满挑战和机遇。未来的发展方向可能包括:
自主导航与决策:结合人工智能技术,提升COBRA的自主导航与决策能力,使其能够在未知环境中自主规划路径和任务。
感知能力提升:通过集成更多的传感器,提升COBRA对环境的感知能力,例如利用视觉传感器进行实时障碍检测和避让。
能效优化:进一步优化COBRA的能量消耗,使其能够更长时间、更高效地执行任务。
多机器人协同工作:研究多台COBRA机器人协同工作的算法和策略,使得它们能够在复杂任务中相互配合,提高工作效率和任务完成度。
▍结语
COBRA作为一种先进的蛇形机器人,展示了仿生学和机器人技术结合的巨大潜力。
可以看到,通过非冲击接触隐式运动优化算法和灵活的机械结构设计,COBRA在物体操控和复杂地形移动方面表现出了卓越的能力。
尽管其未来的发展充满挑战,但也充满了无限的机遇。我们期待着在不久的将来,看到COBRA在更多领域中发挥其独特的作用,为人类社会带来更多的便利和福祉。