
150克仿生爪负载4公斤!首尔大学无人机可“倒挂金钩”,45毫秒精准抓取
文章来源 机器人大讲堂
当无人机“长出爪子”之后,不仅能自由飞行,还能抓取物体。然而,在抓取或降落时,爪子与物体的撞击却成了无人机“栽跟头”的隐患。
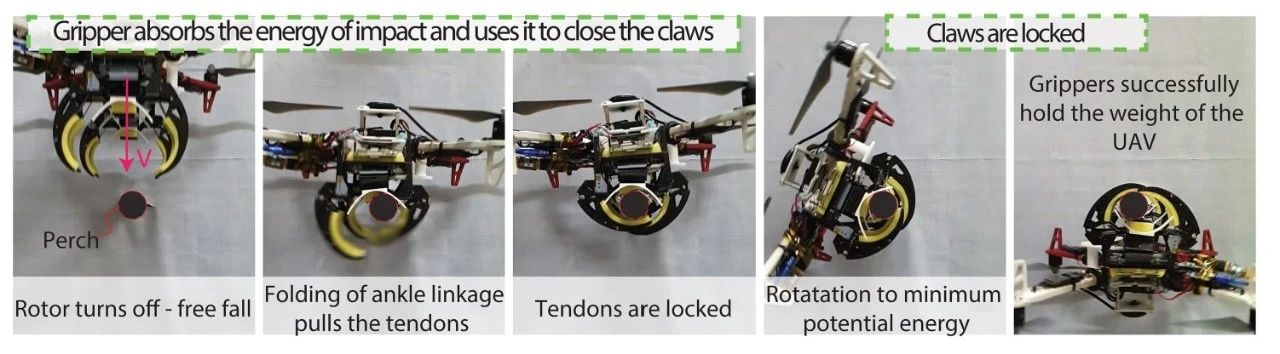
韩国首尔大学的科学家成功破解了这个难题,他们给无人机装上了一种仿生爪子,不仅解决了撞击问题,让无人机稳稳着陆,还让其具备了精准抓取的能力,在触碰到目标物的瞬间迅速抓握,仅需45毫秒!
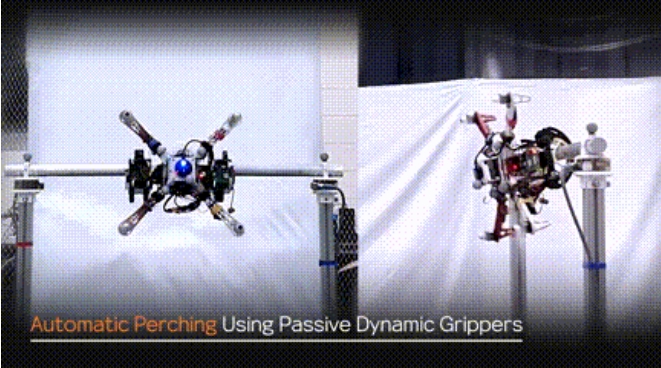
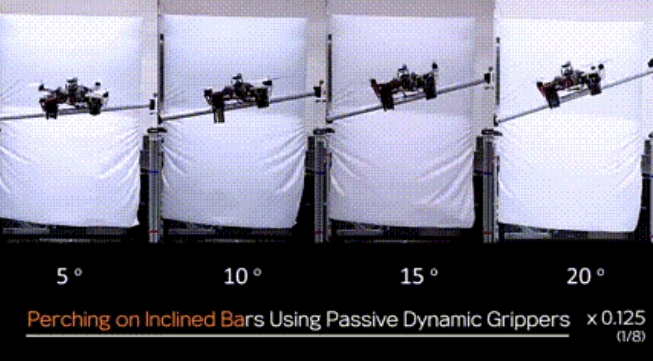
精准落在横杆上,一个倒挂金钩后再完美起身:
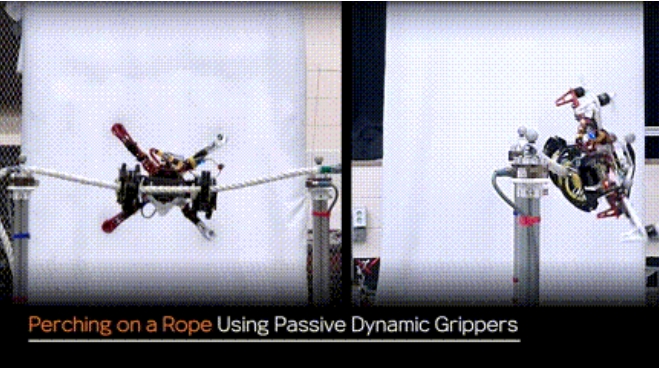
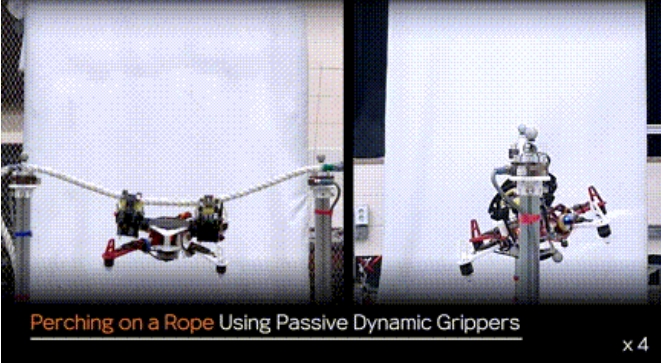
落在软绳子上也没问题:
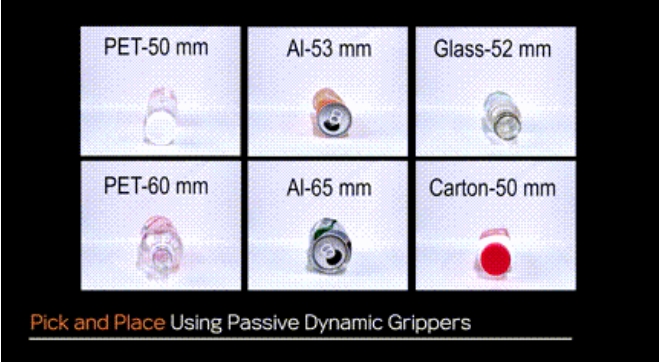
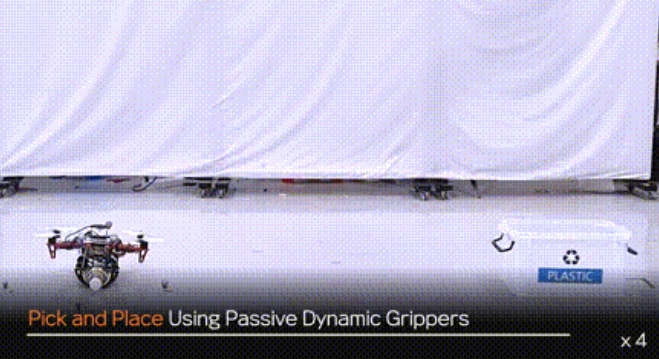
抓起一根管子放在旁边的桌子上:

一套动作行云流水,非常丝滑。
▍来自鸟类的启示,高效的自动栖息机制
研究人员的灵感来源于自然界的超强抓手——鸟爪。
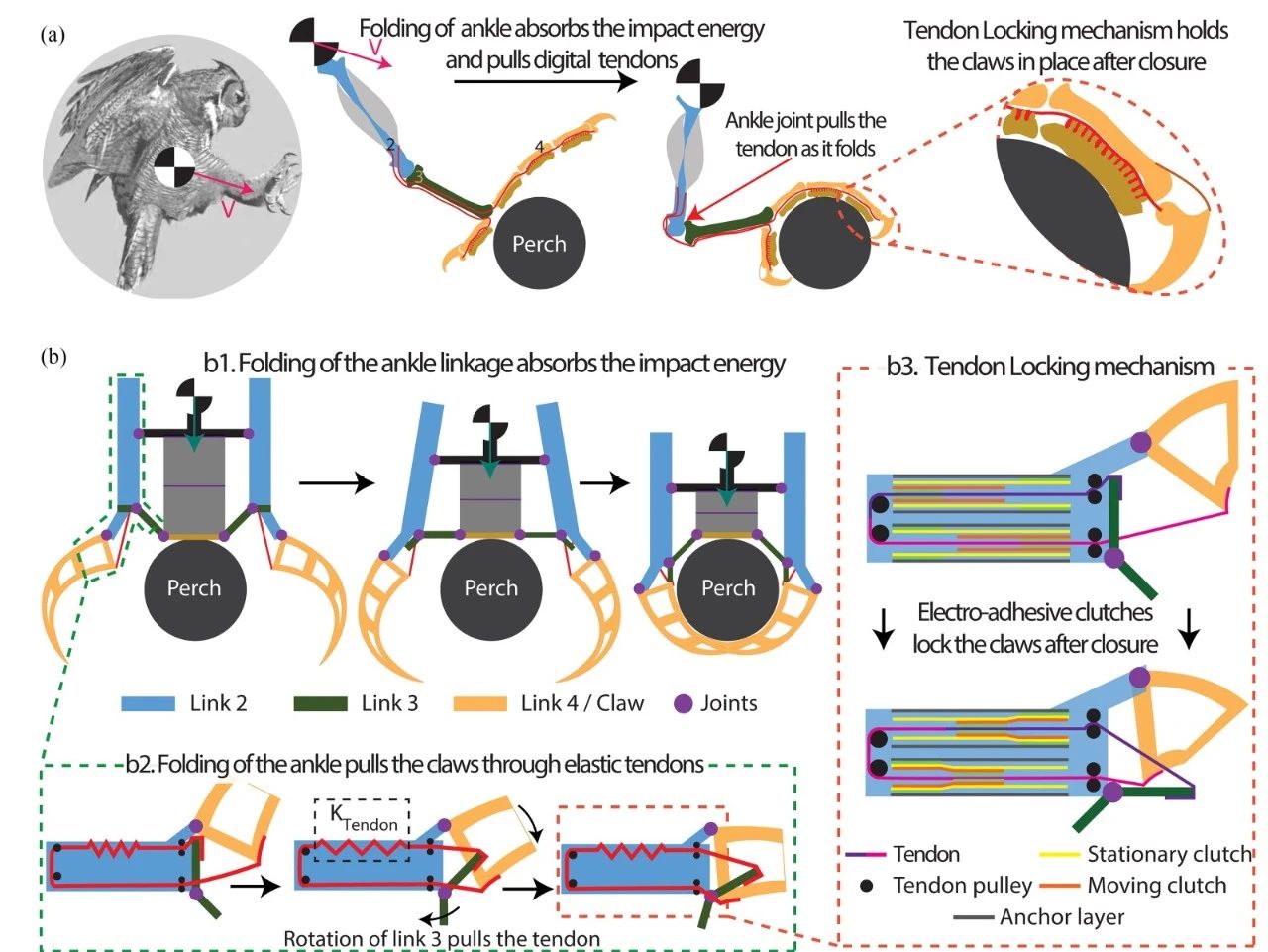
鸟类的爪子在着陆或捕猎时能在几毫秒内迅速抓紧并回收撞击能量,这是因为它们的腿部结构具有一种天然的“自动栖息机制”——将踝关节的折叠运动与爪子的屈曲结合起来,爪子闭合后,肌腱鞘内的棘轮结构会自动锁定肌腱和爪子。

受到这种启发,研究人员将这种“自动栖息机制”复制了在无人机身上,通过柔性肌腱将踝关节和爪子的运动连接起来,在产生撞击时进行稳健、可靠的被动动态抓握。
设计出的仿生爪子由以下三个关键部件组成:
1)脚踝可折叠,并提供必要的运动范围,以便在撞击过程中平稳吸收能量;
2)将吸收的能量转移到爪子的数字肌腱;
3)肌腱鞘中的棘齿状特征,其将肌腱锁定在靠近远端关节处以保持爪闭合;
与之不同的是,大多数的无人机仿生爪采取了主动闭合技术,主要依赖于来自弹簧元件的额外能量。相比之下,首尔大学的这项研究采取的是被动动态抓握方式,这种方式大大地减小了机器人控制方面的成本,能够用最小的能量实现快速抓握和稳定着陆!
▍20ms内锁定爪子,吸收撞击能量
仿生爪子的弹性肌腱在脚踝和爪子之间形成柔软的耦合,在被动动态抓握的能量吸收阶段需要肌腱的伸长,以实现平稳的能量传递。然而,在爪子抓握后,肌腱伸长会导致爪子反冲,甚至打开爪子。
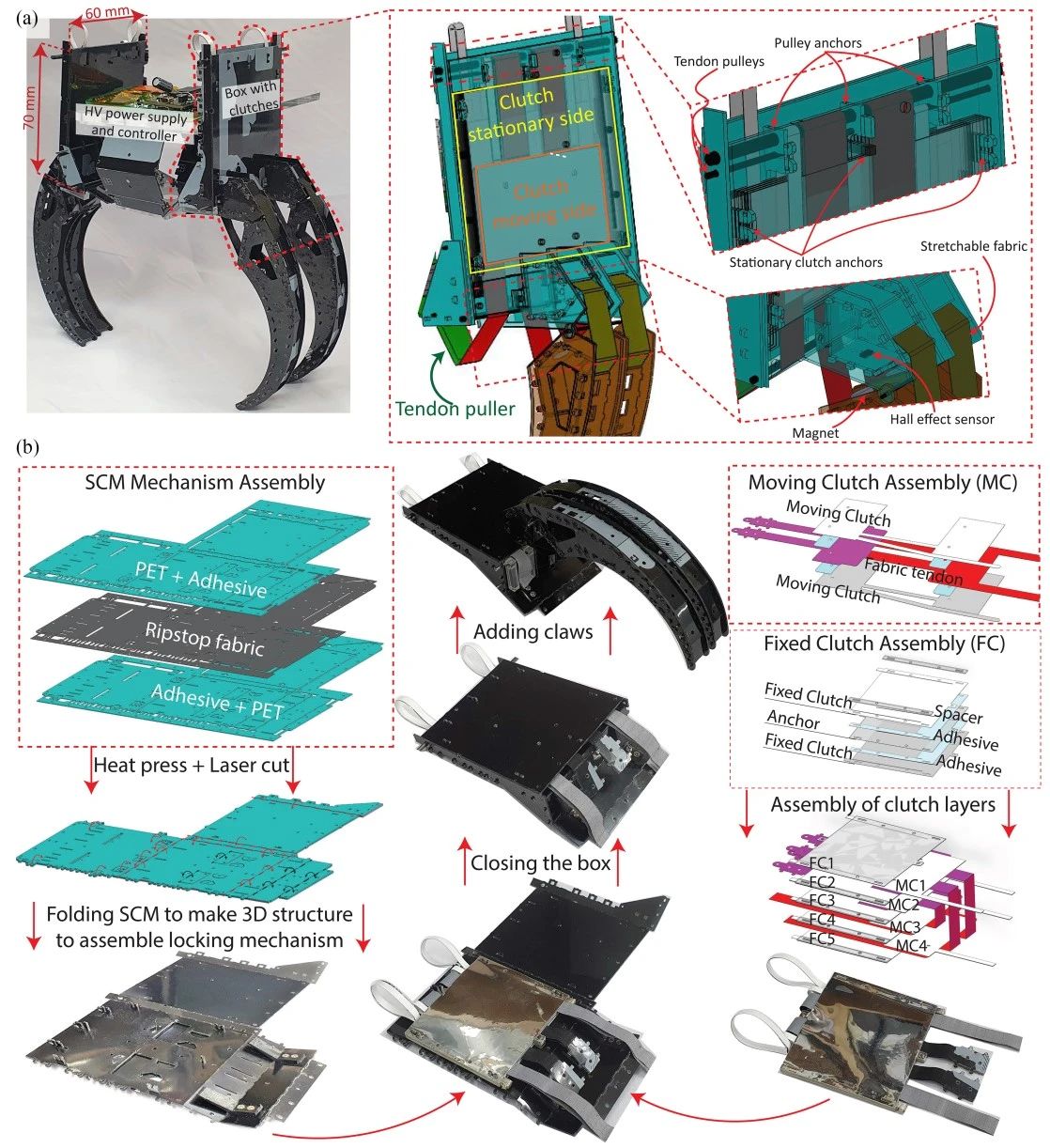
为了防止这种情况发生,必须在设计中加入锁定机构。研究人员开发了一种基于电粘性离合器的紧凑型锁定机构,并在底座中集成了定制的高压电源和控制器板;这个小玩意儿能在爪子闭合后迅速锁定位置,确保抓取稳固。简单来说,这就是机器人的“锁爪”技能,能在启动后20毫秒内迅速锁定爪子。
这个小小的锁定机制仅重10克,不会给无人机飞行产生任何负担,却能够承受高达100N的肌腱张力,相当于4公斤的负载能力!
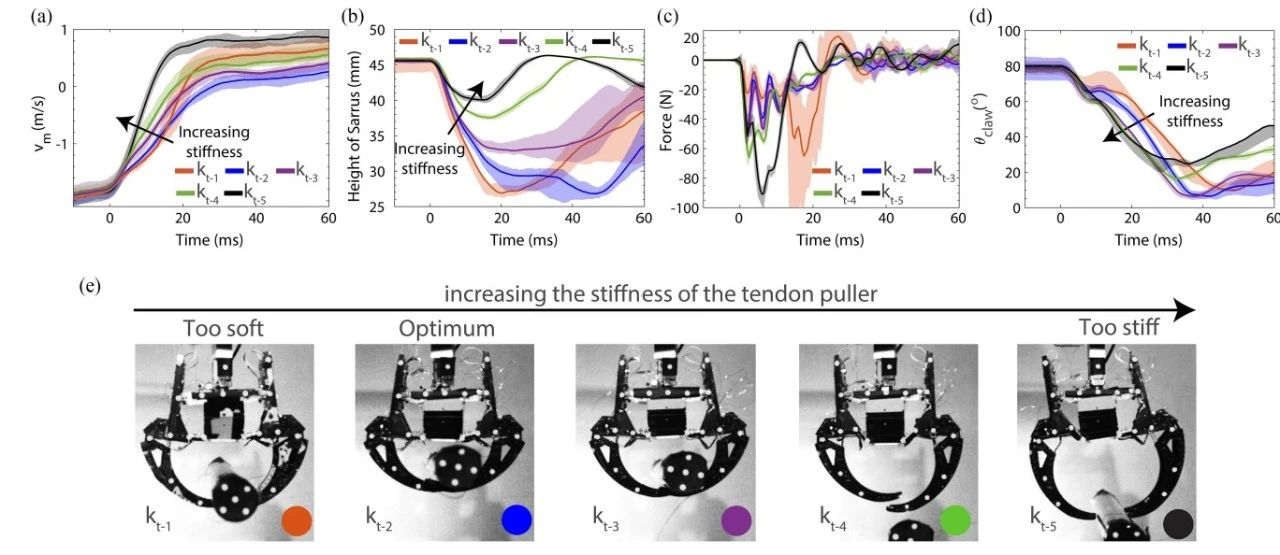
除此之外,在仿生爪的设计中,还有一个非常关键的参数——肌腱刚度。
肌腱刚度可以调整爪子的加速度及惯性力,这是被动动态抓取的重要因素,为了研究肌腱刚度对冲击力学的作用,研究团队设计了一种摆锤装置,使用高速摄像机记录并提取撞击物体和夹持器不同部分的位置和速度,并设计了一个基于撞击物体质量和速度的肌腱刚度动力学模型。
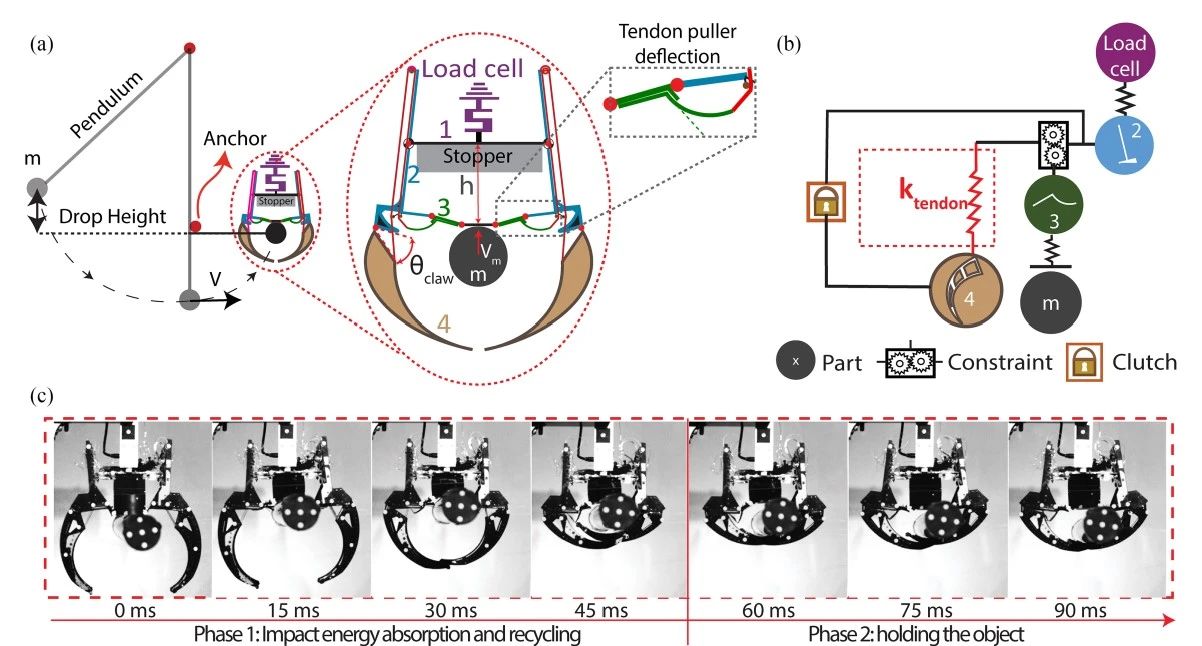
通过多次的模拟与测试,不断地调整肌腱刚度,研究团队实现了仿生爪在各种撞击条件下的最佳性能,以实现撞击能量的平滑吸收和传递,不会产生物体反射。
▍实验验证:多样物体的抓取与栖息
为了验证仿生爪的实际性能,研究团队将其安装在一个1.8公斤的无人机上,进行了多次栖息和抓取实验。
装上“鸟爪“之后,不管是35毫米直径的圆柱杆,还是20毫米直径的绳索,无人机都能轻松应对!
哪怕是不同倾斜角度(0-20°)也能稳稳“栖息”。
除此之外,它还成功抓取并放置了从20毫米到50毫米不等的各种物体,包括易碎的灯!
整套仿生爪系统重量为150克,在准静态状态下可负载4公斤。考虑到离合器和控制电路的低能耗,使用650 mWh的电池可以供无人机使用约140分钟。
这项研究发表在IEEE Transactions on Robotics(IEEE机器人学报)中,文章名为“Perching and Grasping Using a Passive Dynamic Bioinspired Gripper(使用被动动态仿生抓手进行栖息和抓握)“。
▍结语与展望
无人机夹爪技术为无人机应用带来了革命性的变化,它极大地提高了无人机在复杂任务中的操作能力,从物流配送到农业采摘,从环境监测到搜索救援,“装个爪子”有望使这些任务变得更加高效和精准。其次,夹爪技术赋予无人机更高的灵活性和适应性,使其能够在不同环境下完成多样化的任务。
完全使用被动动态抓握、无需额外的控制算法,首尔大学的这项“仿生爪“研究为无人机夹爪领域提供了新思路,解决了夹爪与目标物碰撞的问题,科学家从抓取和栖息两个维度测试了仿生爪的性能,提升了无人机夹爪抓取物体的多样性,为未来的空中无人机应用提供了更多可能。
不过,该技术目前仅在受控的实验室环境中进行了测试,还需要在室外等存在环境干扰的情况下进一步验证可行性和稳定性;另外,仿生爪的性能也还需进一步提升,例如增加新的有限元件使抓握更紧密、调整单一肌腱刚度,使其根据不同条件自动可变刚度,使仿生爪能更灵活自如地应对不同的撞击等。