



- 产品介绍
Quanser的室内多智能体协同控制系统是一个集合无人飞行器QDrone和地面移动机器人QBot 2e为一体的多目标教学和研发平台。目前许多研究人员由于受到采用不同硬件和软件的无人工具制约无法进行不同无人工具之间的协调控制等方面的研究。Quanser公司的多智能体协同控制系统为广大研究人员提供了一个实现多智能体协调控制的工具,用户很方便地就可以将自己的控制器和算法通过这个平台工具进行实现及验证。
可开展的教学和研究方向
● 无人工具的动态建模和控制研究● 运动规划
● 避障控制
● 机器视觉
● 机器学习
● 多信息融合
● 编队控制
● 地空协同控制
● 多机协作
● 无人工具自主控制
● 视觉SLAM
● 传感器网络
● 群控策略
为什么选择室内实验?
Quanser 的 UVS 实验系统使用户可以在一个室内空间进行控制研究与教学。室内实验具有方便介入实验,环境安全可控,实验条件要求相对简单等优点。此外,即使是室内实验, Quanser 公司对于无人飞行器(QDrone)采用特殊的防冲击破坏设计,避免实验人员误操作等情况下对飞行器造成损坏。
整个系统的控制软件都是基于 Quanser 公司研发的,完全基于MATLAB/SIMULINK的实时控制软件QuaRC。很方便地将Simulink仿真框图编译并下载到各装置的处理器,然后进行实时控制,不需要其它语言编程要求。对于每个无人工具的信号采集均通过兼容实时控制软件 QuaRC 的Intel Aero Computer Board 采集卡,方便进行传感器数据采集并对驱动电机发出控制信号,同时,无人机上的 IMU, GPU,各种视觉数据全部对用户开放,为方便研究人员添加更多的传感器,Quanser 公司还预留的硬件接口,方便用户使用。本系统的定位通过OptiTrack 照相机来完成,有关 OptiTrack 的标定、驱动等,都已经在QuaRC软件中以Simulink模块的形式实现。所有这些组成的强健的、开放式的 环境使用户在短时间内就可以进行各种算法研究。
系统简介
本实验系统由如下几部分组成(如下图所示):
● QuaRC实时控制软件和多智能体任务开发体系● 地面控制主站(包含室内定位系统)
● 无人飞行器QDrone
● 地面移动机器人QBot 2e
主要指标和参数
1、QuaRc实时控制软件和多智能体开发体系:
QuaRC作为实时控制软件和支持多智能体任务开发平台,支持基于嵌入式控制器(Gumstix DuoVero)和Qbrain板卡的工具及模块。系统采用Host-Target工作模式,控制器开发在装有Matlab/Simulink的Host主机实现,控制器搭建完成后直接在Simulink下进行编译并通过无线通讯协议下载到无人工具的嵌入式控制器(target机)就可以进行实时控制了。此外,一台Host主机可以同时控制多台不同的嵌入式Target机器,从而很方便地就可以在Matlab环境下进行多智能体系统控制研究。
2、地面控制主站(包含室内定位系统):
Quanser的自主智能体协同控制系统可以通过一台地面控制计算机来实现,包括定位,多智能体控制等。而且整个控制都是在MATLAB/Simulink环境下来进行设计和实时控制实现。主控制机通过无线局域网与各个无人工具进行通讯。
地面控制站主要是进行定位和任务规划等目的。通过六个(或八个或十二个)红外照相机OptiTrack实现空间三维定位。一旦整个控制系统的控制算法设计完成,可以使控制站不仅仅起到定位作用,从而进行无人工具的自主控制及多个工具之间的协调控制研究。
红外定位系统OptiTrack技术参数:
项目
参数
摄像范围
20m2
分辨率
1280×1024
摄像头水平视野
42°,56°
帧速率
120FPS
单点跟踪个数
80个
最多同时捕捉对象物体个数
10个
标定时间
不超过5分钟
定位精度
毫米级
接口
USB2.0
3、无人飞行器QDrone
|
项目 |
参数 |
|
设备尺寸 |
40cm×40cm×15cm |
|
设备重量(带电池) |
1000g |
|
最大载重 |
300g |
|
电源 |
3S11.1VLiPo(3000mAh)电池 |
|
飞行时间 |
一次充满电后可飞行11分钟 |
|
装载的航空数据采集卡 |
IntelAeroComputerBoard-IntelAtomx7-Z875 Quad-core64-bit2.56GHzprocessor GBLPDDR3-1600RAM |
|
可扩展I/O口 |
8路PWM输出 2路UART 3路SPI(SSpins) 1路I²C 4路ADC 3路编码器输入 5路CPUGPIO |
|
深度摄像头 |
IntelRealSense(R200) Depthsensing:3~4m Vision:640×480@60FPSor1080p@30FPS |
|
黑白高速摄像头 |
OmnivisionOV7251 VGA 640×480@120FPS |
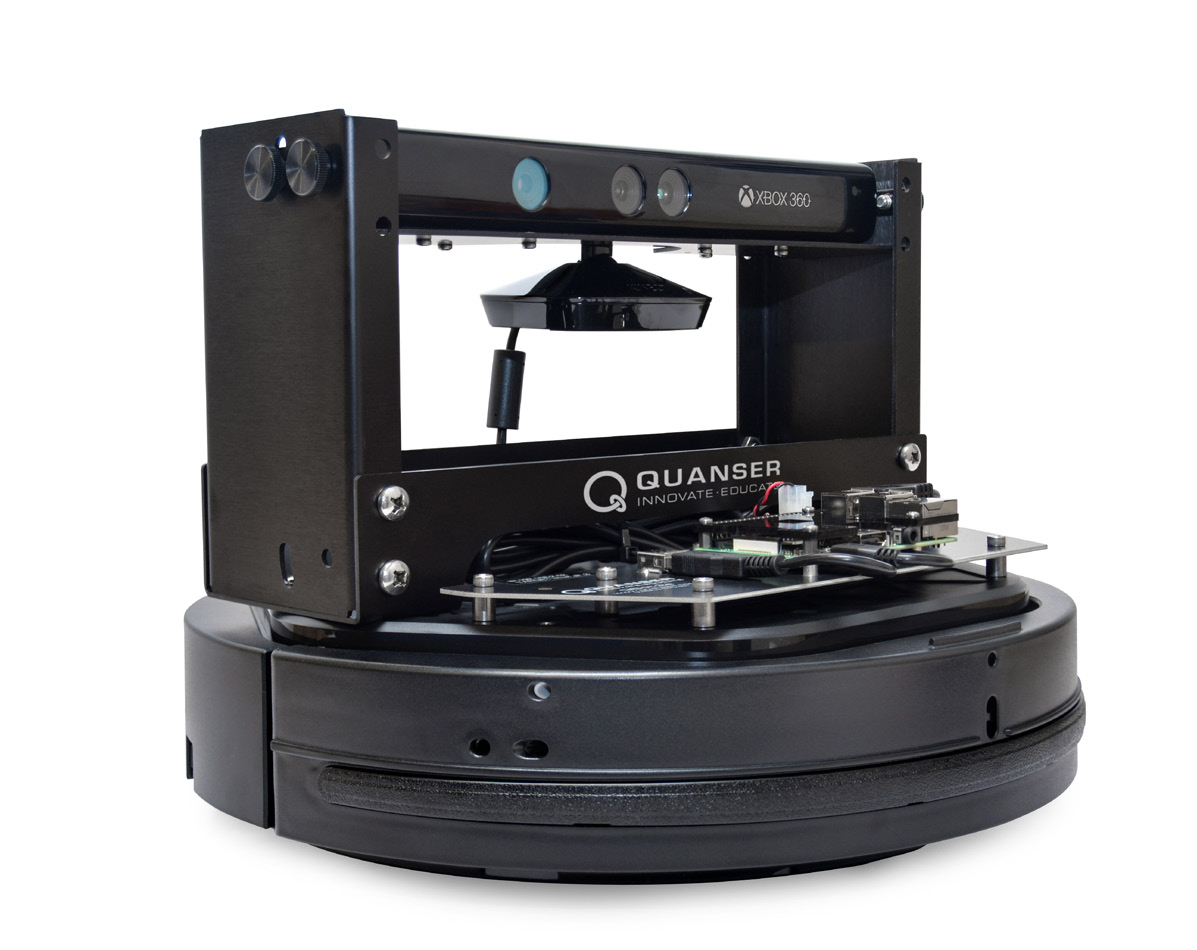
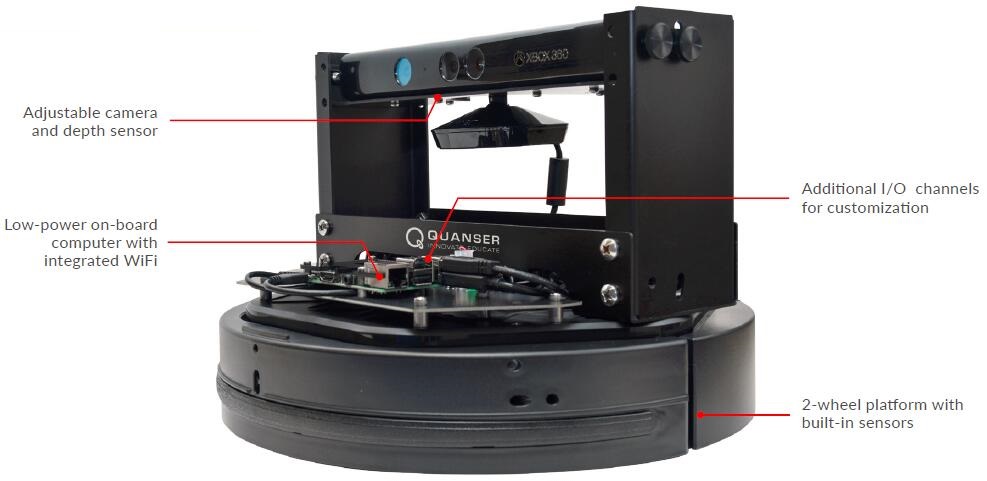
4、地面移动机器人QBot2e
|
项目 |
参数 |
|
设备底座 |
Kobuki移动底座 |
|
车轮数量 |
2个 |
|
设备直径 |
35cm |
|
设备高度(带Kinect) |
27cm |
|
电池续航时间 |
3小时 |
|
最大线速度 |
0.7cm/s |
|
最大载重 |
app.4.5kg |
|
包含的传感器 |
3个数字碰撞传感器 2个数字落轮传感器 3个模拟和数字悬崖传感器 3轴陀螺仪 2路车轮编码器输入 2路车轮速度输出 2路可编程LED输出 4路数字电源使能输出 2路模拟电机电流输入 3个数字按钮 1个电池电压测量传感器 1个Z轴角度测量 2个过流传感器 1个KinectRGBD传感器 |
|
可扩展I/O口 |
28个可编程数字I/O通道 2路PWM输出通道 1路SPI总线通道 1个UART串行端口(接口3.3V串行设备) 1路I²C串行总线通道 4个USB2.0主机端口 1个千兆以太网 1个5.0VDC 1个3.3VDC 1个MIPICSI摄像头端口 1个用于触摸屏的MIPIDSI显示端口 |
|
车载计算机 |
RaspberryPiwithintegratedWiFi |
|
内存 |
1GBDDRSDRAM32MBFlash |
|
QUARC最大采样速率 |
1000Hz |
|
摄像头分辨率 |
640×480 |
|
深度传感器范围 |
0.5m-6m |
客户定制
用户可以根据自己的研究及教学任务自行增加地面移动机器人或无人飞行器等。

