
新型机器人运动控制系统:HARMONIOUS开启人机协作新篇章
文章来源 中国机器人网
当前,机器人正加速融入人类生活与工作环境。在这种趋势下,如何确保机器人在复杂多变、充满动态障碍物且与人类近距离接触的场景中,安全高效地完成任务,成为亟待解决的关键问题。
近日,一项在机器人领域具有突破性意义的研究成果——HARMONIOUS(Human-like reactive motion control and multimodal perception for humanoid robots),即仿人反应式运动控制和多模态感知系统,引发了行业广泛关注。该研究由Jakub Rozlivek、Alessandro Roncone等学者共同完成,相关论文发表于《IEEE Transactions on Robotics》期刊。
HARMONIOUS系统聚焦于仿人机器人上半身的运动控制,旨在解决机器人在面对大量自由度(DoF)控制、动态障碍物以及人类近距离接触时的难题。它能够控制iCub机器人的双臂和三个躯干关节,共计17个自由度。
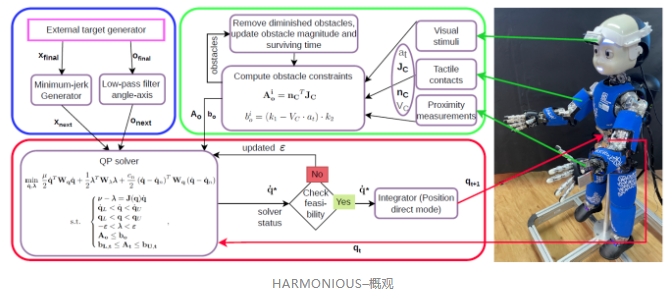
HARMONIOUS系统的核心在于其独特的运动控制器和对障碍物的统一处理方式。运动控制器基于微分运动学,将问题转化为二次规划(QP)问题,通过优化关节速度指令,在满足多种约束的同时最小化速度幅值。在处理障碍物方面,系统创新性地融合视觉、接近(预碰撞)和触觉(碰撞后)三种感知模态,将感知到的障碍物动态映射为运动控制器的约束条件,使机器人具备全身视觉-触觉感知能力,类似人类的个人空间表征,并且能产生类人最小加速度运动轨迹,为安全自然的人机交互奠定基础。
为验证HARMONIOUS系统的性能,研究团队开展了一系列实验,涵盖模拟实验和真实机器人实验。这些实验结果通过多组图表直观呈现,有力地证明了该系统的卓越性能。在模拟实验中,HARMONIOUS系统在多个测试项目里表现出色,超越了其他对比方法。在可达性实验(Exp 1)中,研究人员从笛卡尔空间的3x3x3网格位置中随机选取目标,并随机切换两种方向,测试机器人到达目标的能力。结果显示,HARMONIOUS系统到达6D位姿目标的成功率最高。
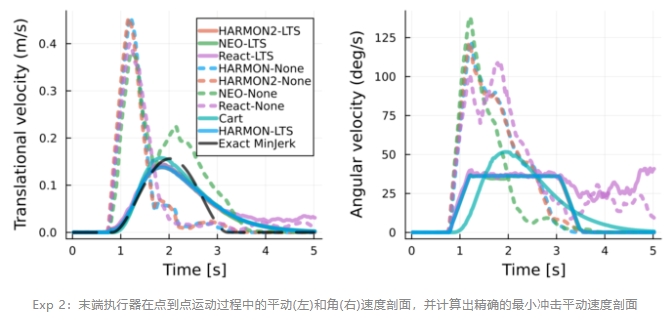
运动平滑性实验(Exp 2)则聚焦于机器人在两点间运动的流畅程度。HARMONIOUS系统通过局部轨迹采样,生成的速度曲线接近人类手臂运动特征,实现了平滑运动。实验展示了不同控制器在点到点运动时末端执行器的平移和角速度曲线,HARMONIOUS系统的速度曲线与人类手臂运动相似,清晰地展示了其运动平滑性优势。
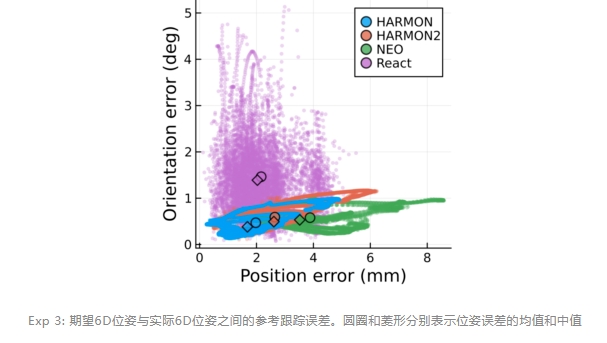
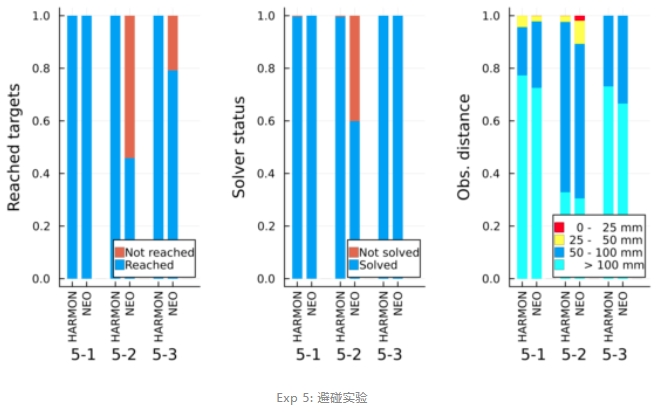
在参考跟踪实验(Exp 3)里,HARMONIOUS系统在跟踪圆形轨迹时,位置和方向误差最低,展现出良好的跟踪性能。碰撞避免是机器人在复杂环境中安全运行的关键能力。在仿真碰撞避免实验(Exp 5)中,面对不同方向移动的障碍物,HARMONIOUS系统能有效应对。真实机器人实验进一步展示了HARMONIOUS系统在复杂场景下的实用性。
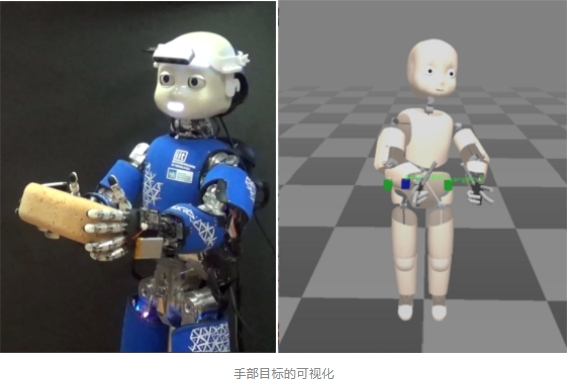
在真实碰撞避免实验中,机器人能实时响应视觉、接近和触觉感知到的障碍物,调整运动以避免碰撞并完成任务。研究团队以可视化的方式呈现了真实世界碰撞避免实验的场景,包括目标位置、人类关键点检测以及障碍物投影等信息;详细展示了机器人在实验中的运动状态、障碍物距离以及触觉激活等数据,生动地展现了机器人在面对不同类型障碍物时的反应和应对策略。
团队公布了双手操作任务实验的照片、可视化场景以及实验数据图表,直观呈现了机器人在双手协作抓取物体时,如何通过调整运动轨迹避开障碍物,确保任务顺利进行。机器人双手协作并避开障碍物,验证了系统在多任务场景下的有效性。
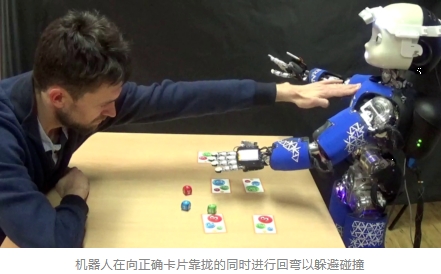
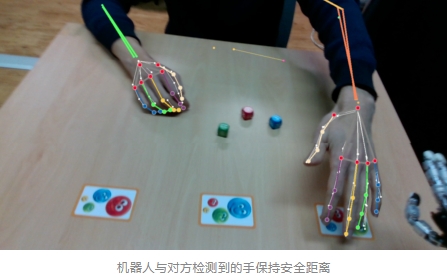
此外,研究团队还通过让机器人参与儿童棋盘游戏的演示,机器人在复杂多变的游戏场景中,能够实时处理大量感知信息,保障人类玩家安全的同时顺利完成游戏任务,充分展示了HARMONIOUS系统在非结构化人机交互场景中的强大性能。
HARMONIOUS系统为仿人机器人运动控制带来了创新解决方案,在人机协作领域展现出巨大潜力。随着研究的深入,未来有望通过增加主动凝视控制等技术进一步提升机器人性能,推动机器人在更多领域的广泛应用。

