
受屎壳郎滚粪球启发?多校联合提出模块化神经控制方法,大幅提升足式机器人多任务操控能力!
文章来源 中国机器人网
模仿动物腿部运动的腿式机器人,凭借其高度灵活性和地面适应性,在运输、勘测、救援等多个领域中被广泛应用。
近年来,腿式机器人技术突飞猛进,不仅在灵活性、智能性方面取得了显著进步,更在自主性上实现了质的飞跃。这一变革使得腿式机器人能够轻松应对更为复杂多变的任务挑战,执行多样化的物体操作任务。这些任务不仅要求机器人具备出色的移动能力,更需将移动与物体操作巧妙融合,形成一体化的多任务操控体系。在此背景下,如何提升腿式机器人的多任务操控能力成为业内学者研究的主流问题之一。

目前,腿式机器人用于物体操控的方法主要有两种:一种是在机器人上加装专用的非移动臂或夹具;另一种则更为创新,即利用机器人本身的移动腿来直接移动和操控物体。
虽然目前的研究主流仍然是传统的夹持肢操控方式,但使用腿来抓握和操纵物体具有更为明显优势,尤其是在处理比机器人本身更大、更重的物体时。这种操控方式不仅可提高机器人的作业效率,还能极大地拓展其应用范围。
▍受蜣螂滚球启发,提出新型控制机制
以蜣螂为例,自然界中的蜣螂,体重通常在150毫克左右,但却展现出惊人的物体操纵能力。它们不仅能够滚动重达10-15克(相当于其自身重量1100多倍)的粪球,还能应对各种复杂地形。这为足式机器人操纵大型物体提供了全新的启示。然而,蜣螂如何在各种地形上稳定滚动不同重量和表面特性的粪球,其背后的机制仍是一个未解之谜。这一谜团也阻碍了将这一自然奇观完全转化并应用于足式机器人。

对此,来自VISTEC与基尔大学动物学研究所的研究团队,对蜣螂滚球的运动机制展开了深入探究。他们不仅研究了蜣螂如何滚动粪球,还探讨了其如何调整腿部运动以适应不同地形,从而稳定滚动各种类型和质量的粪球。
受蜣螂滚粪球行为的启发,研究团队设计了一种模块化神经控制方法,并为了验证这一控制机制的有效性,将其应用于一个蜣螂状机器人(ALPHA)上,在各种地形和球体类型上进行了全面的运动-操作性能测试。
测试结果表明,该控制机制能够精准控制具有生物机械脚的ALPHA机器人在平坦和不平坦的地形上自如行走和滚球。它不仅能处理2.0和4.6kg重量的球体,还能应对不同类型的球体(软球和硬球)。更值得一提的是,ALPHA机器人能够滚动尺寸约为机器人腿长两倍的超大球体,并实现高达每秒10至20厘米的超快滚球速度。

此外,研究团队还深入研究了生物力学的应用,通过添加软材料和基于柔顺鳍条的跗节,进一步改善了机器人的抓握性能和地形适应能力。这些改进使得ALPHA机器人在不平坦的地形上也能实现稳定的滚球行为,从而增强了对动物自适应(多任务)操作行为的感觉运动协调的理解。
这一研究成果不仅为腿式机器人的多任务操控提供了全新的解决方案,也为未来机器人技术的发展开辟了新的道路。
▍模块化神经控制方法构成:神经LCPG模块+ROC模块
通过深入观察蜣螂滚粪球的精细步态,研究团队发现蜣螂滚球时会同时用前腿推地并用中腿和后腿在球上行走,并总结了其腿间协调的四大规则:前腿交替推地,中腿与后腿对角对同步行走,中后腿踏步自后向前传递,以及这些动作协同构成独特步态模式。
受这一策略启发,研究团队提出了一种神经LCPG模块,该模块巧妙模拟了蜣螂的节律性关节运动,并通过分布式控制架构精妙地实现了各腿间的协调运作。
在深入观察中,团队还辨识出两种关键的支撑模式:稳定的三脚架支撑与较为松散的非典型三脚架支撑。前者由特定左前腿、右中腿和左后腿(或右前腿、左中腿和右后腿)三组腿同时站立构成,后者则由另一组腿组合形成,这两种模式的灵活转换反映了前腿与中、后腿间运动耦合的灵活性。实验验证显示,三脚架支撑模式在粪球滚动中展现出更高的稳定性。受此启发,研究团队在机器人设计中融入了默认的三脚架步态,并创新性地引入了ROC模块。
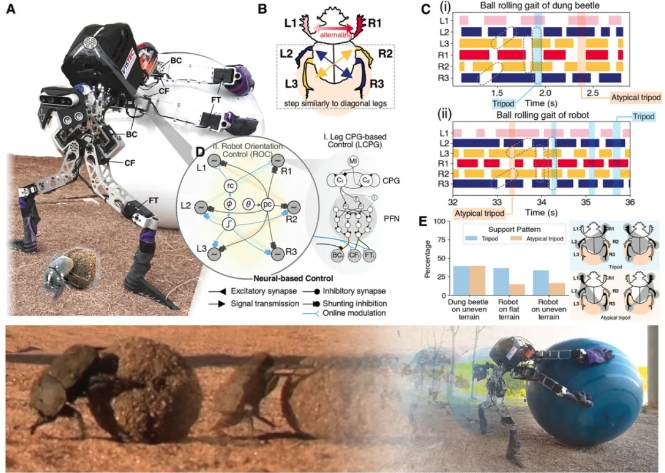
通过在神经LCPG模块中融入ROC模块,研究团队提出了由中枢模式发生器(CPG)模块、模式形成网络(PFN)模块和机器人方向控制(ROC)模块等多个神经模块组成,能够生成适用于行走和滚球的腿部运动的模块化神经控制方法。
具体而言,CPG与PFN模块的融合构成了腿部CPG控制(LCPG)模块,它负责生成包括基本运动、物体操作及其组合在内的节律性运动模式。而ROC模块则根据机器人的实时姿态动态调整关节运动,确保机器人在复杂多变的环境下也能实现稳定且高效的滚粪球控制,同时有效降低了不稳定非典型三脚架支撑模式的出现概率。
最终,通过为每条腿配备一个LCPG模块(共6个),研究团队成功实现了机器人对蜣螂滚球步态的精准模仿,其中前腿生成向后行走轨迹,中腿与后腿则生成向前行走轨迹,展现了基于蜣螂腿内协调机制的机器人控制策略的巨大潜力。
▍多重实验测试,全面评估控制系统性能
为了评估了所提出的仿生、基于神经的操控控制系统,研究团队将其应用于蜣螂型机器人(ALPHA)上进行了全面评估,并重点测试了其基于神经的操控控制系统在多种场景下的表现。
通过精心设计的实验,研究团队深入探索了机器人滚动不同类型球体(包括蓝色软橡胶健身球和白色硬质球)的能力,以及在不同地形(平坦和不平坦)上的适应性。
实验中,研究团队考虑了三种生物力学腿部设置模拟蜣螂的滚球行为,并通过增加特定的结构(如纹理橡胶表面、基于鳍条的柔顺跗节以及后腿的软材料附加)来优化机器人的性能。同时,研究团队还测试了两种基于神经的操控控制策略,即具有相位同步的LCPG模块和LCPG与ROC模块的结合,以评估它们对机器人滚球行为的影响。研究结果显示,机器人的滚球速度整体保持在10至20厘米每秒之间,这一速度范围对于模拟蜣螂的自然行为是合理的。
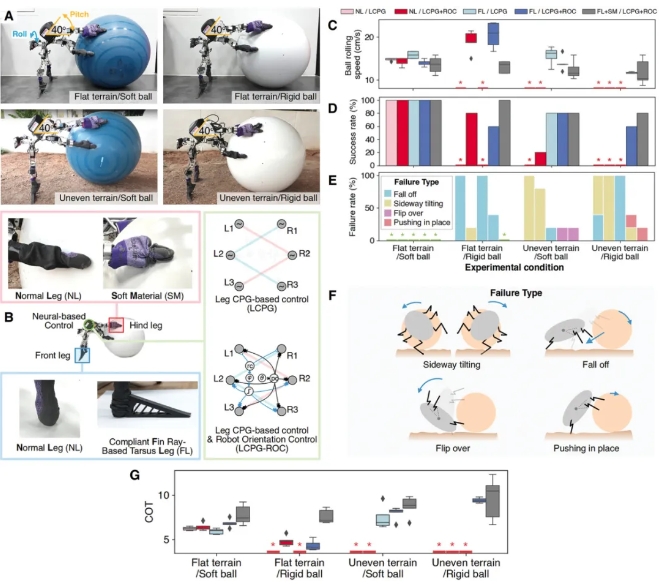
在平坦地形上,机器人成功运输了软球,并且当配备ROC模块时,其成功率显著提高,尤其是在滚动硬球时。而当在前腿上添加基于鳍条的柔顺跗节时,可以增加腿与地面之间的摩擦力,从而提高滚球的稳定性和速度。后腿添加软材料后,虽然滚球速度有所减慢,但机器人能够更稳定地滚动球体,特别是在平坦地形上实现了滚动硬球100%的成功率。
在不平坦地形上,机器人的滚球任务面临更大的挑战。然而,通过引入ROC模块和在前腿上附加柔顺跗节,研究团队成功地提高了机器人的成功率。特别是在最终条件下,即机器人在不平坦地形上滚动硬球时,使用带柔顺跗节的LCPG和ROC模块以及后腿添加软材料的组合策略,使得机器人的成功率达到了80%,这一结果充分验证了研究团队所提出的控制系统的有效性。
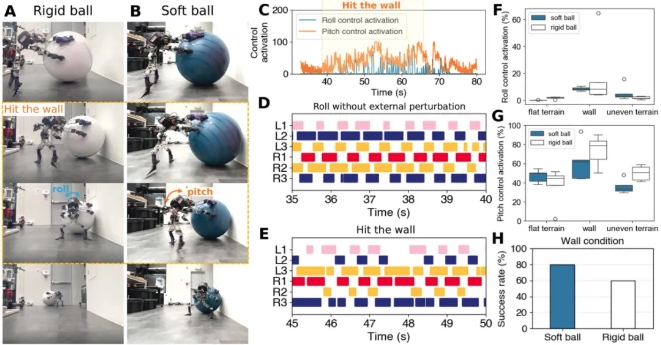
在测试中,研究团队还发现,得益于神经控制系统的灵活性和适应性,机器人在滚球过程中展现出了一种自发行为,即当球接触墙壁时,机器人会自适应地调整姿态,与墙壁保持平行。同时,实验还表明,墙壁对机器人滚球行为的干扰程度大于不平坦和平坦的地形,且软球在撞击墙壁时比硬球更具优势,导致滚动软球的成功率更高。这些发现为进一步优化机器人的滚球行为和提升其环境适应能力提供了重要依据。

