
用于细胞显微操作!浙江大学与慕尼黑工业大学合作研发出新型可培养皿内游动微型软体机器人
文章来源 机器人大讲堂
细胞作为生命体的基本结构和功能单元,其操纵技术在农业生物育种、生物细胞工程、生物医学工程等领域有着广泛的应用前景。
然而,在微小尺度下对细胞进行显微操作,尤其是柔性无损抓取和运输,是一项复杂而具有挑战性的任务。
近日,来自浙江大学和慕尼黑工业大学的研究团队,提出了一种仅使用三对电磁线圈即可实现磁性微型机器人旋转、运动和抓取操作的机器人平台与控制方法。该微型机器人采用特殊设计的微型夹持器,可实现在培养皿内完成自主游动导航、准确柔性地抓取和运输细胞。

论文地址:https://spj.science.org/doi/10.34133/cbsystems.0109
研究成果以"Magnetic Soft Microrobot Design for Cell Grasping and Transportation"为题发表在中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems上。
▍微型机器人设计与制造
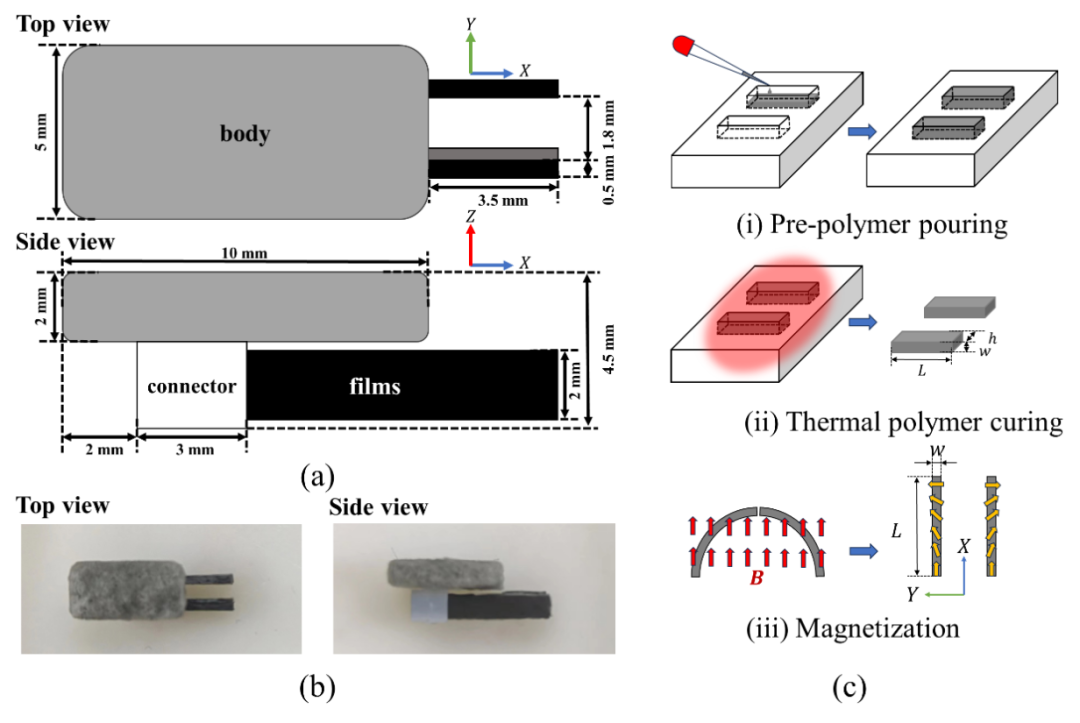
微型机器人由非磁性机身、3D打印连接件和两个磁性薄片组成。磁性薄片采用Ecoflex 00-10聚合物基质与钕铁硼磁性微粒按1:1的质量比混合制成。通过在模具中倒入预聚物,然后进行热聚合固化,可以获得定制形状的薄片。按照特定形状磁化后,两个磁性薄片构成微型夹持器,用于细胞的抓取与运输。
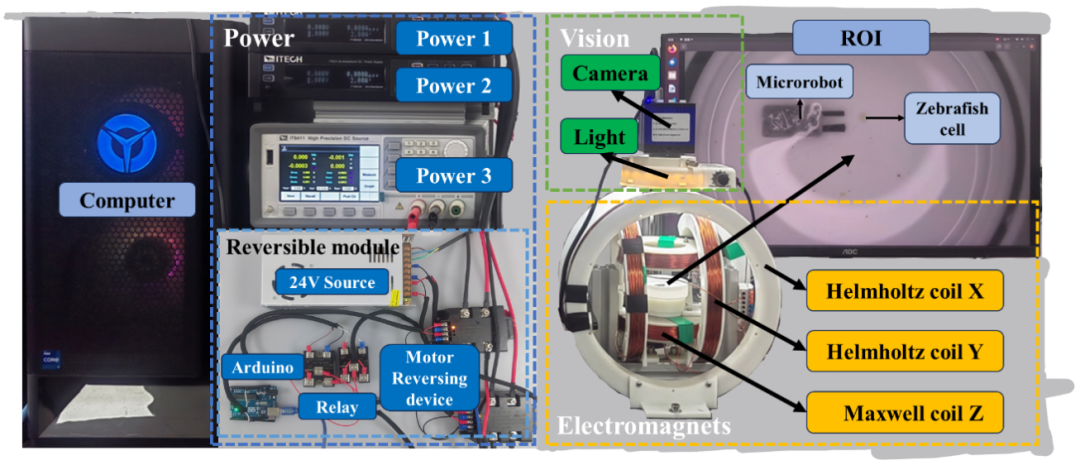
▍系统设计与工作原理
研究人员设计构建一个具备提供三自由度控制的最小线圈数电磁驱动平台,用于驱动微型机器人。该平台在x-y平面上正交放置两对亥姆霍兹线圈,在z轴上配置一对麦克斯韦线圈,可以在任意方向旋转磁性微型机器人,并在其磁矩方向上施加磁驱动力。
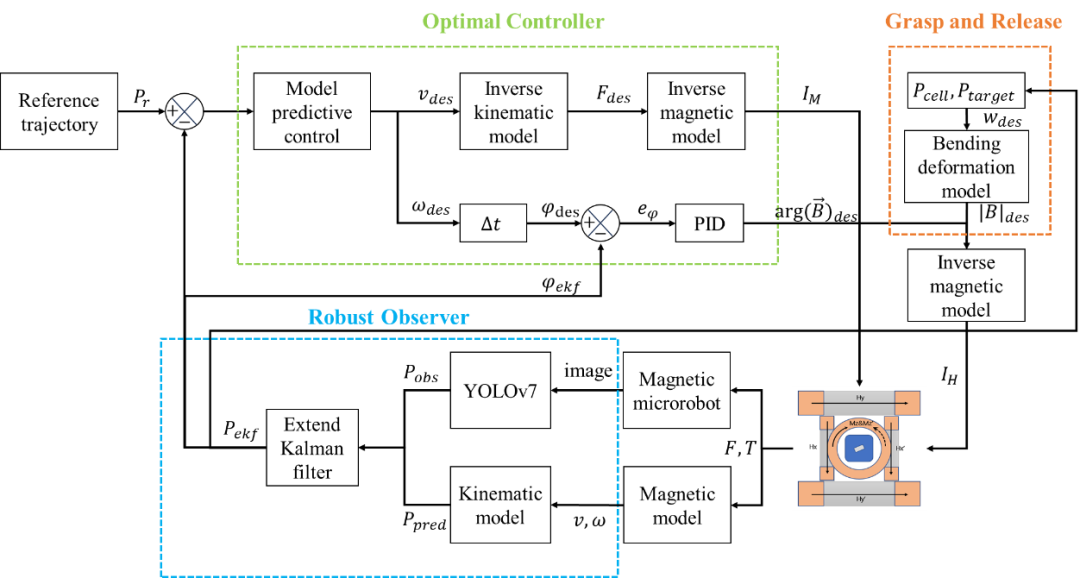
▍控制系统设计
为了实现微型机器人的精确控制,研究团队设计了一套完善的控制系统。针对微型夹持器,他们建立并验证了其弯曲变形模型,确保抓取的精确性。同时,采用了扩展卡尔曼滤波(EKF)与模型预测控制(MPC)相结合的方法,实现了微型机器人的精准轨迹跟踪控制。在抓取和释放控制方面,研究人员提出一个抓取和释放模块,通过调节线圈电流来控制微型夹持器的闭合和打开。当机器人靠近目标时,触发抓取动作;当机器人到达目标释放位置时,触发释放动作。

▍实验验证
为了验证所设计控制策略的优化效果,本文对其进行了轨迹跟踪测试和斑马鱼胚胎细胞运输测试。实验表明,采用扩展卡尔曼滤波(EKF)与模型预测控制(MPC)相结合的方法,实现了微型机器人的精准轨迹跟踪控制,在此策略下微型机器人的轨迹跟踪平均绝对误差(MAE)小于0.155mm,仅为其尺寸的1.55%,展现了控制策略的准确性。
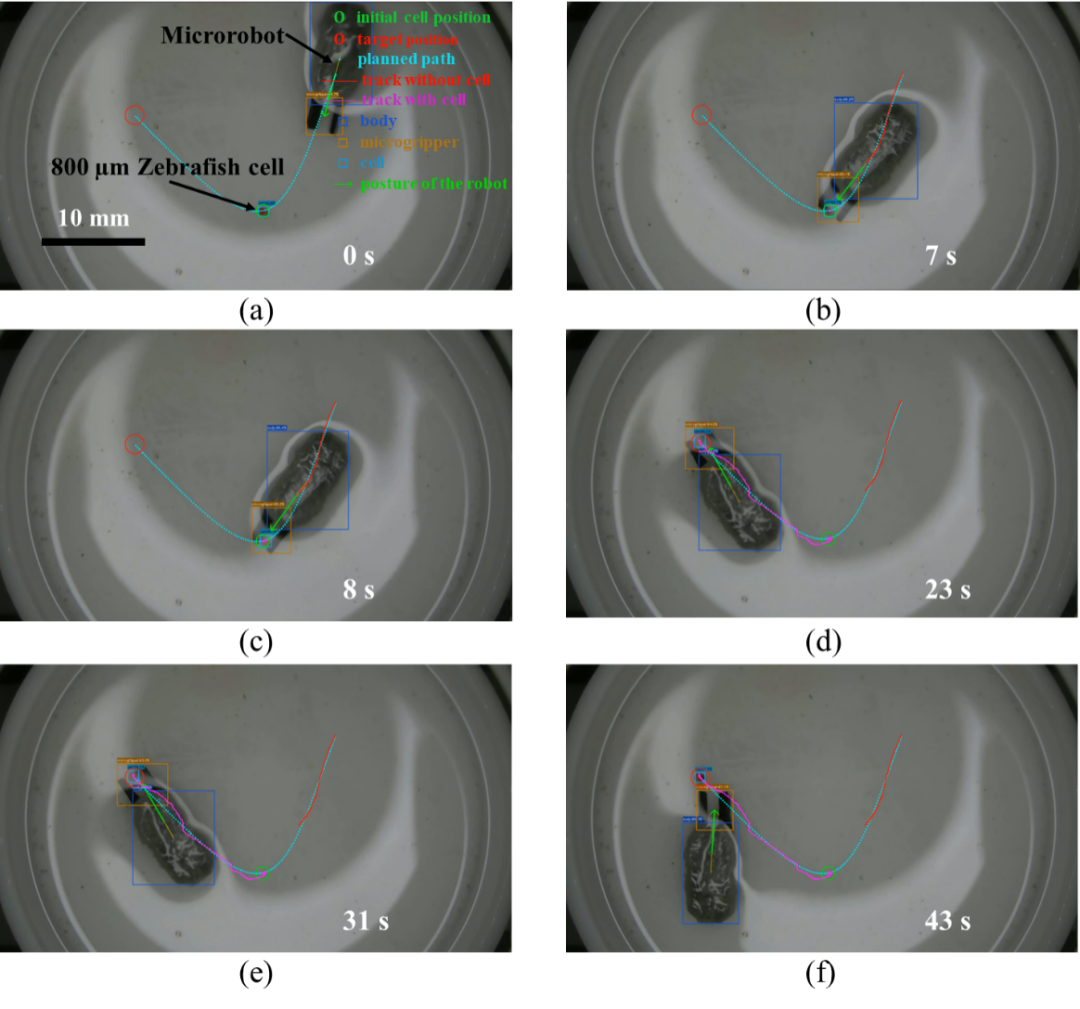
此外,研究人员还成功开展了斑马鱼胚胎细胞(直径800μm)的抓取和运输实验,释放误差MAE仅0.067mm。实验结果不仅验证了所提出的微型机器人及其相关模型的精确性和有效性,还凸显了其在体内外细胞操作方面的巨大应用潜力。
▍总结与展望
本文的主要贡献包括:
1.设计了一个集成的电磁力控制平台和软体微型机器人,能以最少的输入同时控制微型机器人的旋转、移动和抓取,为精确的微操作提供了新颖解决方案。
2.设计了EKF-MPC算法和微型夹持器弯曲变形模型,实现了精确的轨迹跟踪和目标抓取。
3.应用本系统,实现了斑马鱼细胞的精确自动化点到点运输,释放误差MAE仅0.067mm,展示了该方法在细胞操纵任务中的高精度和自动化潜力。
这一研究成果为细胞操纵技术的发展提供了新的思路和方案。未来,基于该磁性软体机器人系统,有望实现更加智能化、自动化的单细胞操作,为农业育种与生命科学研究带来新的突破。

