
六条腿是冗余构型吗?
文章来源 机器人大讲堂
大自然中六条腿的蜘蛛常见,六条腿的狗却找不到。然而前不久,由联想研究院上海分院自主研发,联想首款足式机器人——联想晨星足式机器人GS,却有着神奇的六足构型。
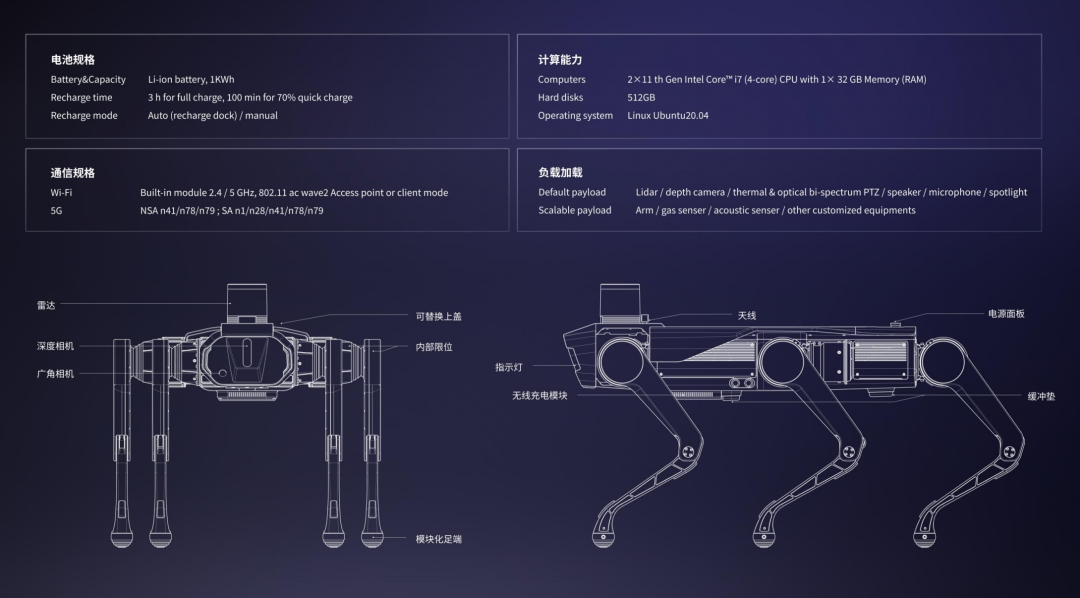
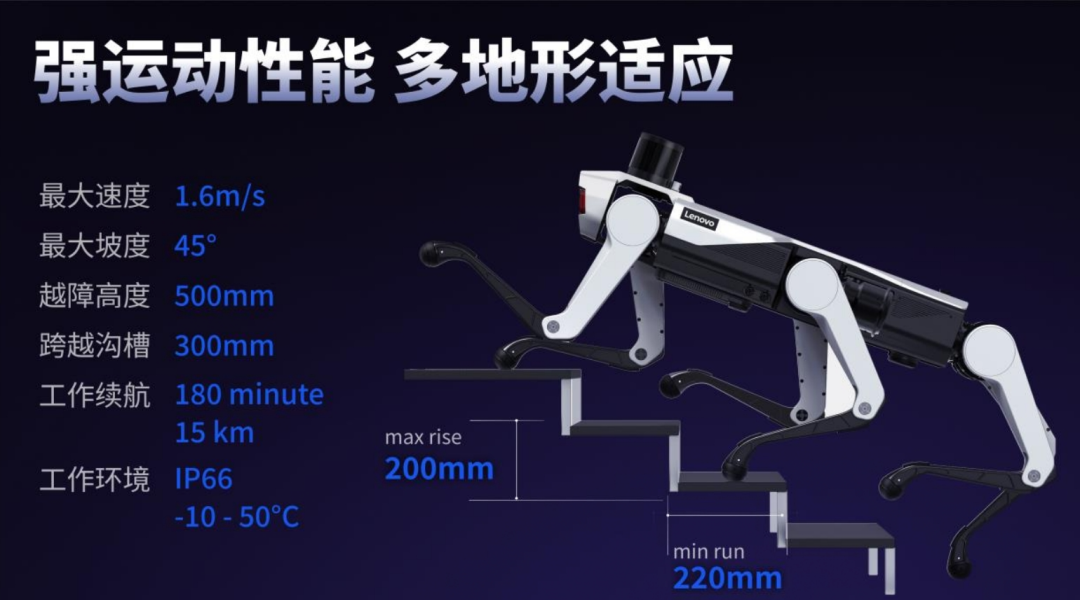
官方介绍,联想晨星足式机器人GS是一款通用型六足机器人,六足的设计使它具备野外复杂地面越野通过力。它的负载能力可达100KG,具有IP66的防护等级及自适应防滑。未来主要适用于工业巡检操作,应急救援,野外勘测等应用场景。
▍六足设计的原因
这款机器狗大体造型和常见的四足机器狗差不多,也是反曲臂腿,但它有六条,联想认为,从仿生学来说,六条腿的生物是地球上分布最广的、最具环境适应性,相对于四足动物,多出来两条腿意味着更多的灵活性和一定的冗余度,可以产生更多步态。最典型的三三步态让Bot GS在任何时候都保持三点着地,形成稳定的三角形支撑,带来更高的稳定性。
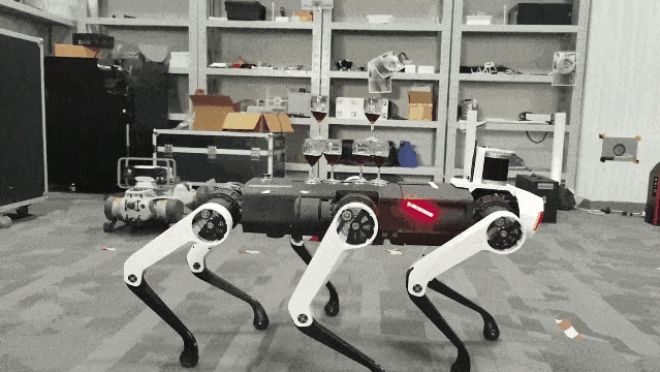
六足机器人可以更加均匀地分散体重,从而更好地适应不平坦的地形和复杂的环境。此外,六足机器人在移动时,可以有更多的腿同时与地面接触,这有助于提高稳定性和减少摇晃。联想就展示了这款机器狗在稳定性方面的一些优势,表现为机器狗能够摆上红酒杯移动。
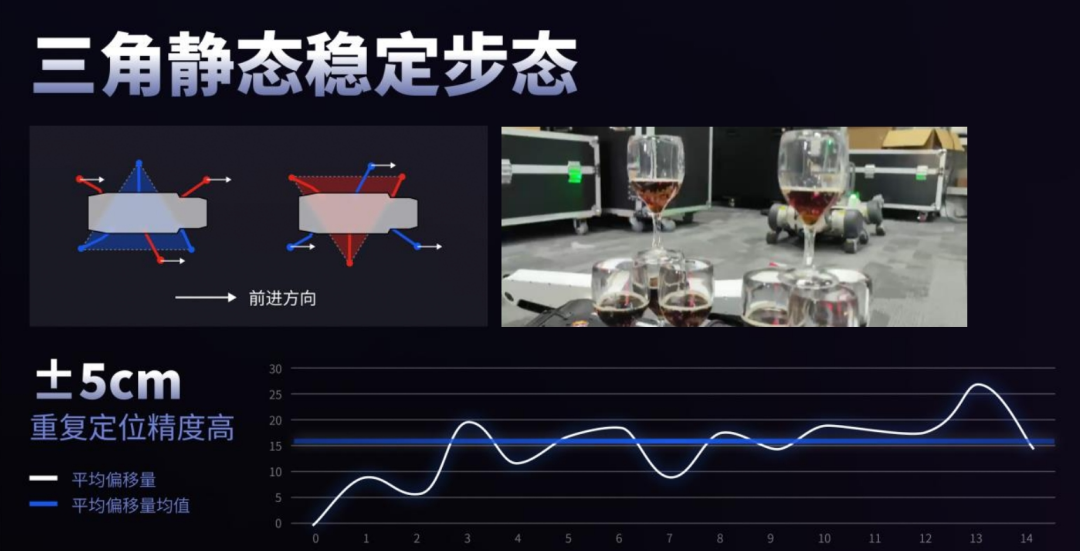
联想表示,六足带来的优势在于,六足机器狗行走中极强的稳定性能帮助提高重复定位精度。实际应用中,足式机器人背负机械臂这些大负载时,就像人背重物一样,每走一步的小偏移会积少成多变成大偏差,导致足式机器人负重跑远距离就产生积累出了很大的定位偏差,从而无法准确到达目标点位。这种情况下六足机器人的行走稳定性优势体现得更明显,每走一步不会因为背负重物产生偏移,所以重复定位精度可以做得很高,达到正负5cm以内,相当于轮式机器人的定位水平。
除了行走稳定性和负重能力优势,Bot GS的行走噪声非常低,它的行走噪声跟同等距离听键盘打字的音量差不多。这样一来在室内工作时,对周围的噪声影响会降到极低,还可以减少对机器人自带的声学传感器的干扰。基于六足的特别构型,它能在冰面、油污地面轻松稳定通过而不会滑倒,即使背负重达16kg的作业臂,机器人也不会侧翻。

此外,Daystar Bot GS的数据收集能力也是其一大亮点。它可以在任何地点和时间进行全面的数据收集工作,无论是温度、湿度、气压等环境数据,还是地形、地貌等地理信息,都能被Daystar Bot GS精准捕捉并实时传输。这为各行业提供了宝贵的数据资源,有助于企业做出更加明智的决策,增加机器人的多样性和适应性。
▍四足设计的前因后果
六足机器狗设计曾经在波士顿动力的成长史中留下过一段记忆,但很快该公司舍弃掉了这种方案,并最终选择了四足的构型。
其考虑的原因非常直接,因为对于机器人来说,每个关节的动力传输能量消耗都很大,因此,每条腿最好具有最少数量的节段,两个节段带有一个关节,并且该关节需要像脚踝一样设计成反曲臂腿,以实现高效的向前运动动态稳定性。
机器人外观和结构设计的最终选择大多是出于优化预期应用的稳定性、移动性和性能的愿景,需要综合考虑步频、步幅、能耗、稳定性等多个因素,以实现最优的性能和效率。从机械结构设计角度来说,六条腿确实很酷,但这对于算法提出了太高的要求,反而四足构型相对简单且易于实现,因为设计师可以通过优化腿部结构和运动控制算法,通过高步频来进一步提高机器狗的稳定性和机动性。
步频这个概念表现为足式机器人经常“跺脚”。步频越高,机器人每分钟迈出的步数就越多,因此移动速度也就越快,而且在四足机器人的运动中,较高的步频意味着机器人能够更快地调整其姿态和位置,以应对复杂或不稳定的环境,这种快速的调整能力有助于提升机器人在运动中的动态稳定性,避免在行走过程中因地形变化而摔倒或停滞。
四足除了步频较好之外,更进一步来说,机器人的设计通常受到生物学灵感、工程考虑以及它们要执行的特定任务的综合影响。例如目前四足机器狗大多采取仿生学设计,膝盖向前弯曲,这样是为了可实现更稳定、更高效的步态,尤其是足式运动,这种设计可以提供更好的平衡性和敏捷性,使机器人更有能力在不同的地形中导航并执行复杂的任务。此外,使用后向膝盖还可以促进先进控制系统和传感器的集成,增强机器人的整体功能,而六足机器狗则有很大区别。
▍价值与创造
但采用六足设计也并非无用,至少在探索新的机器人构型和运动方式研究角度来说这样存在一定价值。因为机器人构型研究的目标是为了学习节肢动物快速跑步时非常稳定的控制结构和全身力学模式,研究者会通过这种仿生学习,判断机械结构下,身体和四肢控制架构如何适应牛顿力学约束,规避一系列问题。
目前人类对于运动科学的探索目前还非常初级,机器人运动科学尚未建立作为一个单一的明确定义的学科,虽然有可能将运动力学解构为一个简单的大脑激活肌肉,肌肉移动骨骼,骨骼执行工作的单向框架,但这种框架无法包含解释生物复杂的动态特性,因为神经系统和机械系统动态耦合都在控制过程中发挥重要作用,这带来了非常复杂的问题。
由于相关的知识基础跨越了生物学的范围,目前全球的工程师依然都在尝试探索神经生理学,生物力学,控制系统工程和非线性动力系统的最新进展,多学科融合整合肌肉,骨骼和神经力学,创造有效的运动行为的机械结构。而仿生学设计能够更快构建一个节肢动物陆地运动的模型系统,并收集其丰富的实验数据,概述数学模型,因此四足机器狗成为了目前市场上保留下来的品种。
借助之前对于六足设计的研究,波士顿动力开发出了一款六足机器人RiSE ,但主要设计用于攀爬墙面,机器人无需任何特殊附着力,重量非常轻,每条腿由大约 50 个自由度组成,可以以5厘米/秒的速度爬升,腿部庞大力矩是这个产品的优势。
联想这款机器狗出来后,参数被许多网友吐槽,但我们认为,真正做事的人会欣赏别人的努力,这款六足机器狗,未来如果参数能够持续进化,或许也将带给我们更多惊喜。

