智能移动作业机器人解决方案
一、方案背景
在工业4.0,柔性制造的大环境下,如何能通过智能设备的集成,最大程度的减少设备对环境的改造要求,从而完成作业,使移动机械臂的研究已经变为近期研究热点。移动机械臂具有移动和操作两部分模块,复杂系统对各部分的智能化程度提出了更高的要求,如移动机器人路径规划与机械臂的协同控制,多机器视觉系统与复杂系统的控制等。
针对不同应用环境,我司提供各种经过软硬件综合验证,建立完整的通讯的信息结构,具有完整的3D仿真软件的移动机械臂系统,方便用户快速完成相关研究。

二、室外移动机械臂系统
2.1 室外版简介
室外最大的特点是地面环境复杂,针对室外移动机械臂系统,需要在室外各种环境下完成运动,保持姿态,完成抓取执行。我们通过各种验证,为用户提供三种平台,让研究更适配,让选择更轻松。
适合的研究方向有:
(1)无人车方向
(2)室外遥操作机器人
(3)基于视觉和深度学习抓取研究方向
(4)3d/2d slam, 路径规划定位导航方向
(5)手臂结合视觉伺服和路径规划方向
2.2 全地形室外版
移动机器人推荐来自加拿大的Clearpath公司提供的Jackal为移动底盘,该底盘具有充足离地距离和坚固耐用的特性。具备复杂室外运动能力,坚固耐用,平地负载可达20kg。
机械臂推荐来自加拿大的Kinova轻型两指或三指机械臂,该手臂特点是每个关节力数据,电流数据等均可读取。

配置清单:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.3 高负载室外版
移动机器人推荐来自加拿大Clearpath 公司提供的Ridgeback为移动底盘,该移动底盘负载高,可以支持到50Kg以上负载。
机械臂推荐来自丹麦的UR5 6自由度机械臂,该机械臂重复定位精度高,安全性强,适合开发各种通适性强的室外应用。

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.4 运动型室外版
移动机器人推荐来自智科特公司自研究的室外移动机器人Caster,该底盘性价比高,具备可拆卸电池和自动充电功能,可实现24h不间断运行。
2.5 室外版配置表
![]() 表示选件
表示选件 ![]() 表示标配
表示标配

3.1 室内版简介
室内移动机械臂通常需要在有较为严格的空间限制下进行研究,因此灵活可控的系统是进行室内移动机械臂的首选。我们通过我们丰富的经验为您选择了满足基本研究需求,复杂研究需求和工业版需求的室内移动机械臂系统。
3.2 教学入门版
模块化的ROS机器人平台,使用turtlebot2作为机器人底盘,可选配机械臂、双目摄像头、3D摄像头、激光雷达、深度学习控制器等设备,使学生、教育工作者、研究人员和开发人员能够利用多功能的开源ROS开发平台进行实践。

3.3 通用室内版
智科特自研移动底盘Caster,搭配加拿大Kinova机械臂。满足稳定性、易用性的需求,可以进行移动机械臂协作化工作的验证。用户可以在此基础上开发更多服务类机器人应用。
3.4 室内版配置表

3.5 高负载室内版
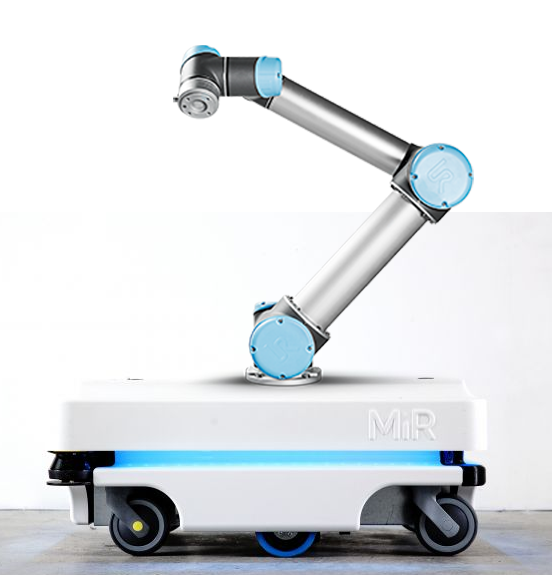
高负载版的移动机械臂使用Clearpath Ridgeback移动机器人,负载可高达100kg,并可进行全向移动,搭配UR系列机械臂,可进行更多重载应用的实验和研究。

3.6 工业版室内版
移动机器人推荐Adept Lnyx,机械臂推荐UR5,工业版适用于进行实际工业移动机械臂模拟与验证,配合Adept Lnyx易操作的软件界面和编程方式以及UR5实用性强的工作能力,用户可以把科研领域的算法结合到工业中落地实施。
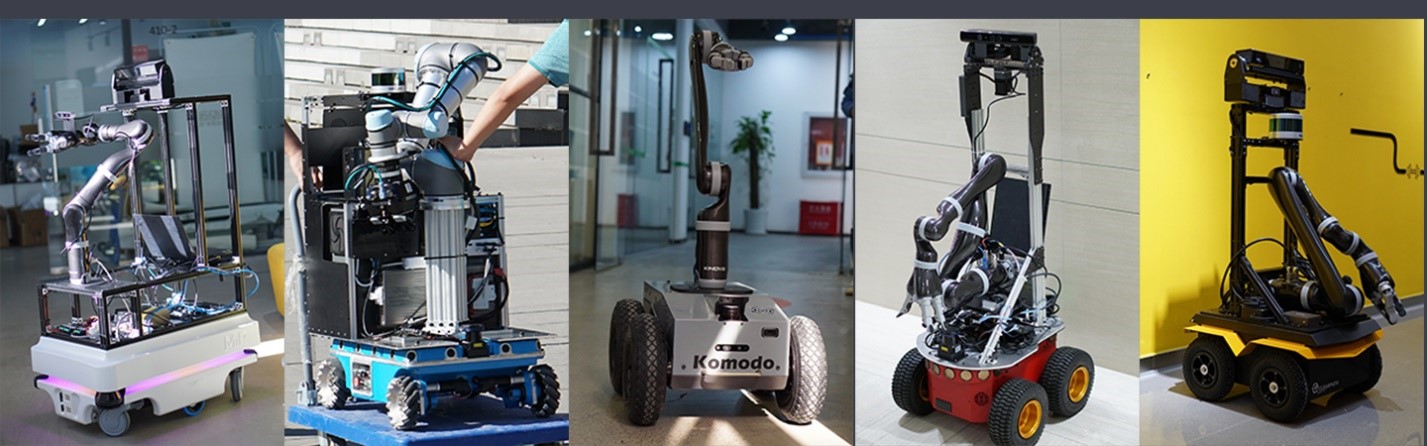
根据以上方案,我公司完成的项目如下: