

- 产品介绍
加拿大Quanser公司的Qbot2e是专为本科教学和研究而设计的开放式高性能移动机器人。Qbot2e是一个创新的开放式自主地面机器人,内置多种传感器和视觉系统。Qbot2e配套有大量的课件,非常适合对先进的机器人技术和机电一体化等课程进行本科教学和研究,开放式的结构设计,可以添加多种支持QuaRC软件的传感器,可根据研究项目定制满足需要的平台。
工作原理
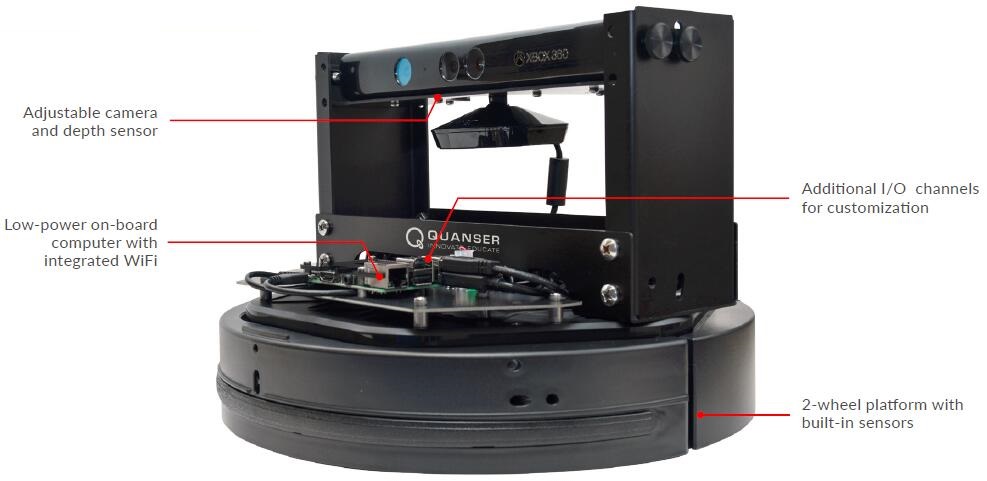
Qbot2e建立在差分驱动器配置的移动平台上,使用两轮驱动并内置编码器。采集机载传感器数据并驱动电机,QBot2e采用Quanser的数据采集卡(DAQ)和无线嵌入式计算机。机载传感器包括碰撞传感器、陀螺仪和RGBD等一系列丰富的传感器。数据采集卡还包含一些I/O通道用于连接其他的传感器,包括数字(SPI、UART、I²C)和模拟传感器。
QBot2e视觉系统由集成的RGB摄像头和深度传感器组成,用于在几个分辨率和帧率下捕捉RGB图像数据和11位深度数据。支架结构可以改变倾斜角度转换视角。
QBot2e使用主从结构,控制器在地面站的主机上使用MATLAB/Simulink开发。Quarc实时控制软件从主机下载实时代码到QBot2e的嵌入式计算机里,可以通过地面站主机运行、修改和远程监控代码。QBot2e上的控制器是开放式结构,用户可以任意修改。
QBot2e组件
1. QBot2e地面移动机器人
2. 兼容MATLAB®/Simulink®的实时控制软件Quarc
3. 教师和学生指导手册,用户手册,快速使用手册
4. 预设控制器
实验课件
1. 差分驱动运动学
2. 正向和反向运动学
3. 航位推算法和里程计定位
4. 路径规划和避障
5. 2D绘制和网格地图占用
6. 图像采集处理和分析
7. 并发建图与定位
8. 移动机器人的高级控制结构
主要特点
1. 低成本,一体化,无需组装
2. 课程包括机器人和机电一体化的独立练习
3. 多种传感器,包括碰撞传感器、落轮传感器、悬崖传感器、3轴陀螺仪、RGBD传感器等
4. 可定制与QUARC配套的传感器,包括数字(SPI、UART、I2C)和模拟量传感器
5. 摄像机支架结构可以通过调节角度改变视角。
6. 为高性能实时决策和执行任务配置的低耗机载计算机和Linux操作系统。
7. 可以与Qbot(Qbot 2, Qbot)和Qball (Qball 2, Qball-X4)组成协同控制系统
8. 完全兼容Matlab®/Simulink®
9. 提供MATLAB/Simulink全记录的系统模型和参数
10. 开放式结构设计,可以设计所需的控制器
设备规格
| 项目 | 参数 |
| 设备底座 |
Kobuki移动底座 |
|
车轮数量 |
2 个 |
|
设备直径 |
35 cm |
|
设备高度(带Kinect) |
27 cm |
|
电池续航时间 |
3 小时 |
|
最大线速度 |
0.7 cm/s |
|
最大载重 |
app. 4.5 kg |
|
包含的传感器 |
3 个数字碰撞传感器 2 个数字落轮传感器 3 个模拟和数字悬崖传感器 3 轴陀螺仪 2 路车轮编码器输入 2 路车轮速度输出 2 路可编程LED输出 4 路数字电源使能输出 2 路模拟电机电流输入 3 个数字按钮 1 个电池电压测量传感器 1 个Z轴角度测量 2 个过流传感器 1 个Kinect RGBD传感器 |
|
可扩展I/O口 |
28 个可编程数字I/O通道 2 路PWM输出通道 1 路SPI总线通道 1 个UART串行端口(接口3.3V串行设备) 1 路I²C串行总线通道 4 个USB 2.0 主机端口 1 个千兆以太网 1 个5.0 VDC 1 个3.3 VDC 1 个MIPI CSI 摄像头端口 1 个用于触摸屏的MIPI DSI显示端口 |
|
车载计算机 |
Raspberry Pi with integrated WiFi |
|
内存 |
1 GB DDR SDRAM 32MB Flash |
|
QUARC最大采样速率 |
1000Hz |
|
摄像头分辨率 |
640 × 480 |
|
深度传感器范围 |
0.5 m - 6 m |