




- 产品介绍
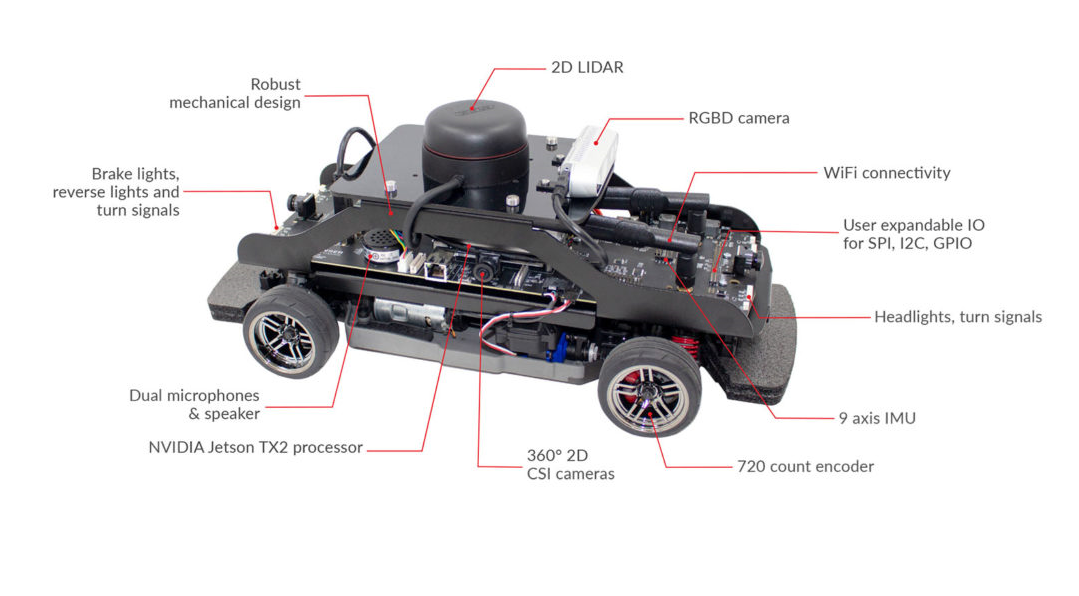
无人驾驶实验平台QCar是一个专为高校实验室而设计的可高度扩展、配备多种传感器且功能强大的实验平台。可用于进行数据集成、地图绘制、导航、机器学习、人工智能和其他高级无人驾驶概念的研究学习。QCar配备多种传感器,包括LIDAR、360度视觉传感器、深度传感器、IMU、编码器以及可扩展I/O口,可以实现对周围环境的准确测量。QCar提供的开放式架构使得使用者可以研发自己的控制器。QCar可为使用者提供多种语言开发环境,包括MATLAB®/Simulink®、Python™、TensorFlow和ROS等。
QCar主要技术参数
| 项目 | 参数 |
| 设备尺寸 |
|
|
设备重量(带电池) |
|
|
电池 |
|
|
持续运行时间 |
|
|
车载计算机 |
|
|
激光测距 |
|
|
摄像头 |
|
|
可扩展IO口 |
|
|
网络连接 |
|
|
QCar附加部分 |
|
QCar支持的Software&API
1. QUARC Autonomous Software License
2. Quanser APIs
3. TensorFlow
4. TensorRT
5. Python™ 2.7 & 3
6. ROS 1 & 2
7. CUDA®
8. cuDNN
9. OpenCV
10. Deep Stream SDK
11. VisionWorks®
12. VPI™
13. GStreamer
14. Jetson Multimedia APIs
15. Docker containers with GPU support
16. Simulink® with Simulink Coder
17. Simulation and virtual training environments (Gazebo, QuanserSim)
18. Multi-language development supported with Quanser Stream APIs for inter-process communication
19. Unreal Engine