
浙大赵朋/张承谦团队Science Robotics:软体机器人弹跳达到新高度
文章来源 中国机器人网
例如,蚱蜢能依靠强壮的后腿实现垂直跳跃至自身长度的10倍或水平跳跃至20倍。与其他运动方式如爬行或滚动相比,跳跃被证明是高效且适应复杂地形的运动方式,在微型机器人领域具有潜在应用。
近年来,科学家们致力于开发软体弹跳机器人,相比于刚性弹跳机器人,由弹性材料构成的软体弹跳机器人具有更好的抗冲击能力和环境适应能力。然而,现有的软体弹跳机器人在响应速度、起跳速度和跳跃高度等方面,仍无法与自然界的生物相媲美。为了提升软体弹跳机器人的跳跃能力,科学家们一直在尝试采用刺激响应材料,通过预先存储能量再释放的方式来提高输出功率,而这一过程普遍伴随着较长的响应时间。因此,在现有的基于刺激响应材料的弹跳系统设计中,高功率输出与高速响应往往难以兼顾,这极大地阻碍了软体弹跳机器人的进一步发展。
针对上述问题,研究团队针对目前小型软体机器人难以平衡输出功率与响应速度的瓶颈问题,提出了一种基于立体折叠的双稳态结构与磁化设计,通过磁场驱动实现突弹跳变,实现能量的高效存储与快速释放。基于该原理所开发的双稳态弹跳机器人在弹跳高度与响应速度之间实现了平衡,在最高可以弹跳超过自身身高100倍的同时,响应时间也只需数十毫秒,各项指标均优于现有软体弹跳机器人。该研究为软体机器人的高效运动提供了全新的思路。
研究成果于近日发表在机器人领域权威学术期刊《Science Robotics》上,题为“Bistable soft jumper capable of fast response and high takeoff velocity”。浙江大学机械工程学院赵朋教授、张承谦博士与卡内基梅隆大学Carmel Majidi教授为论文通讯作者,浙江大学机械工程学院博士生唐道梵和张承谦博士为论文第一作者。
软材料的柔顺性虽然赋予了其较好的抗冲击能力,但同时也在一定程度上限制了其功率输出能力。为了提高软体弹跳机器人的输出功率,研究人员创新地构建了一种可以实现立体翻折的三维结构。该结构呈金字塔形态,其四个侧面由具有高杨氏模量的磁性材料构成,确保了结构的刚度和驱动能力;而结构的折痕处则采用低杨氏模量的硅胶材料,利用其良好的拉伸和弯曲性能,实现了结构在垂直方向上的翻折。该结构具有两个稳态点,当在外力的驱动下,结构从初始稳态翻折至第二稳态时,折痕处成为应变集中区域,积累了大量弹性势能。处于第二稳态时,结构维持在一个脆弱的稳定状态,只需施加轻微的反向作用力,即可触发突弹跳变现象。该现象会使结构迅速从第二稳态切换回第一稳态,并在此过程中释放出存储的弹性势能。作为一种功率放大机制,突弹跳变实现了弹跳机器人的高功率输出,并有效地提高了弹跳机器人的起跳速度。研究人员这一双稳态结构进行了优化设计,通过调节结构的能量势垒,不仅增加了结构所能存储的弹性势能,同时也改善了其整体的稳定性。
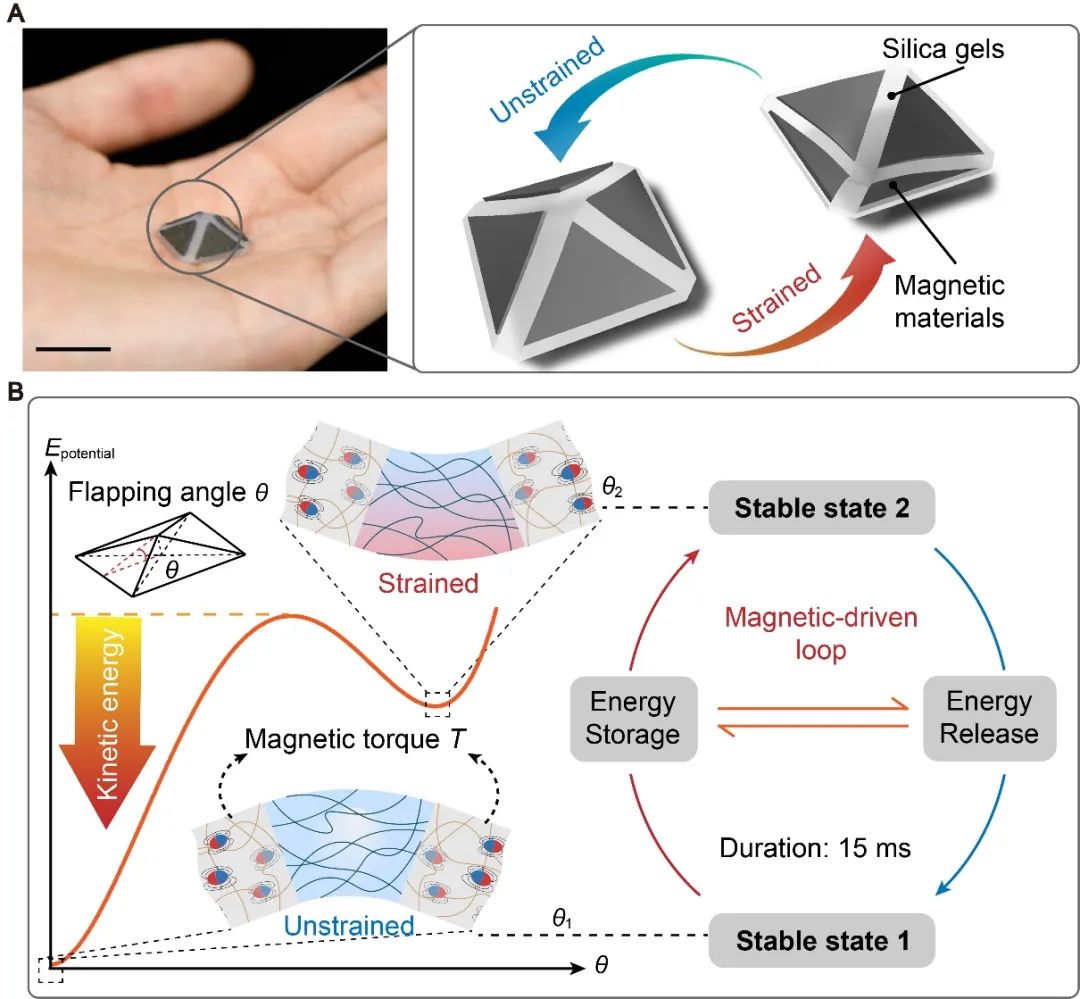
图1 双稳态弹跳机器人工作原理示意图
为了能够在稳态间快速切换以提高弹跳机器人的响应速度,研究人员开发了一种基于磁场的无线实时驱动方法。双稳态弹跳机器人内部磁性材料的磁化方向经过排布设计,在外部脉冲磁场的激励下,这些磁性材料的磁化方向趋于与磁场方向保持一致,所产生的磁矩可使得立体折叠结构发生高效翻折,从而驱动双稳态弹跳机器人在不同稳态间进行快速切换。随着稳态在磁场的驱动下进行快速切换,双稳态弹性机器人也实现了弹性势能的高效存储与释放。相比现有弹跳机器人动辄数十秒的准备时间,基于双稳态的磁控弹跳机器人能够在前次弹跳落地后,仅需不到50毫秒就能完成弹性势能的再存储与释放,真正达到了与自然界中弹跳昆虫相媲美的响应速度。
此外,研究人员深入探究了双稳态弹跳机器人在磁场作用下的动态响应特性。通过对脉冲磁场进行多参数调控,双稳态弹跳机器人可以衍生出两种运动模式:大幅度跳跃和连续性微跳。在大幅度跳跃模式下,机器人能够实现长距离的快速移动,展现出高效的空间跨越能力;而在连续性微跳模式下,机器人则能够进行精细的位置调整,表现出高度的定位精度。与传统的只具有单一运动模式的弹跳机器人相比,双稳态弹跳机器人具有更好的环境适应性与通过能力。
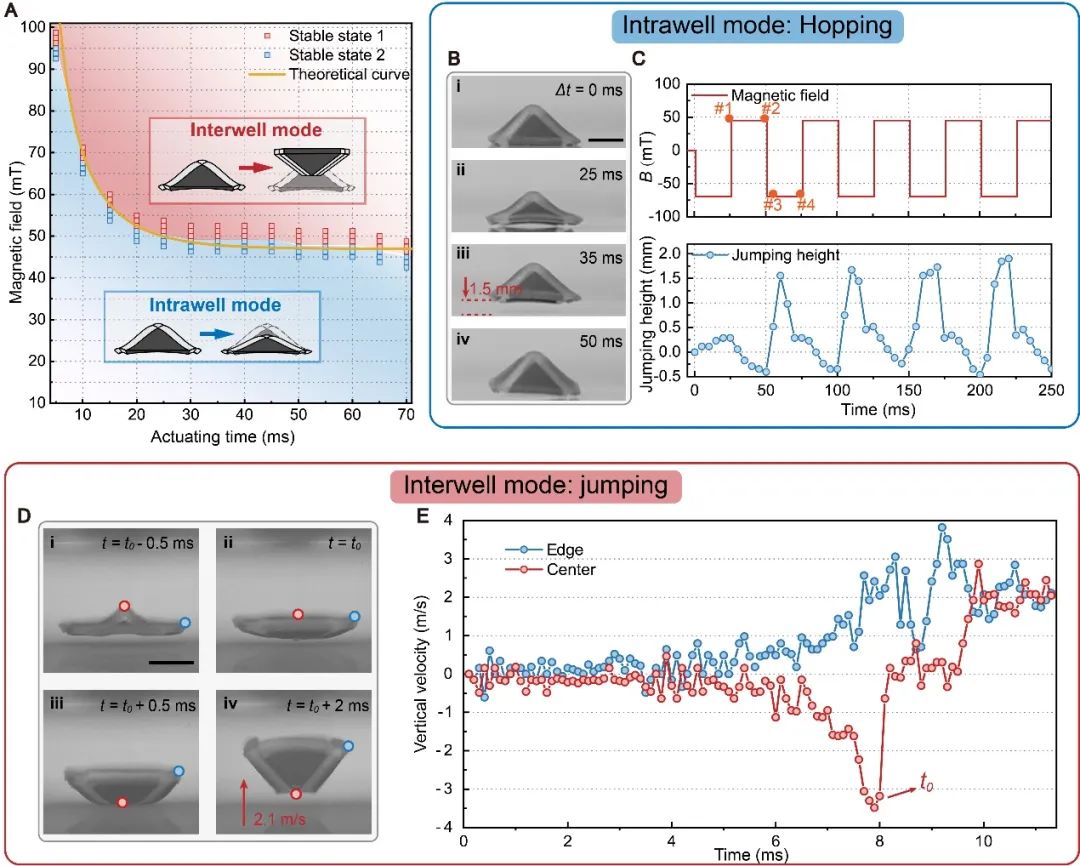
图2 双稳态弹跳机器人的两种运动模式
研究人员还进一步验证了双稳态弹跳机器人的弹跳可控性。在偏转磁场的驱动下,双稳态弹跳机器人在突弹跳变过程中也会发生偏转,从而改变起跳方向与起跳角度。经过实验验证,双稳态弹跳机器人可以实现360度全向弹跳,并且通过精确调整磁场的强度和方向,双稳态弹跳机器人的弹跳轨迹在高度和距离上都能得到细致的调控,实现了真正意义上的定向弹跳。
为了展示双稳态弹跳机器人在复杂环境和受限空间内的应用潜力,研究人员搭建了模拟封闭管道的实验场景。双稳态弹跳机器人需要穿越封闭管道并完成对管道内水质的净化。面对S形管道,双稳态机器人能够通过连续微跳的方式灵活地进行穿越;面对高度落差超高自身身高10倍的U形管道,双稳态弹跳机器人利用其精确的定向弹跳能力,成功跨过了U形管道,展现出了良好的通过性。除了陆地环境,双稳态弹跳机器人还能在水下环境中利用连续性微跳进行有效移动,并具备了从水下到空气的跨介质弹跳能力。如图3所示,在利用自身所携带的载荷完成水质净化的任务后,双稳态弹跳机器人从水底起跳,并在出水过程中调整自身角度,最大限度地降低了穿越水面时的阻力,最终顺利地跃出水面。
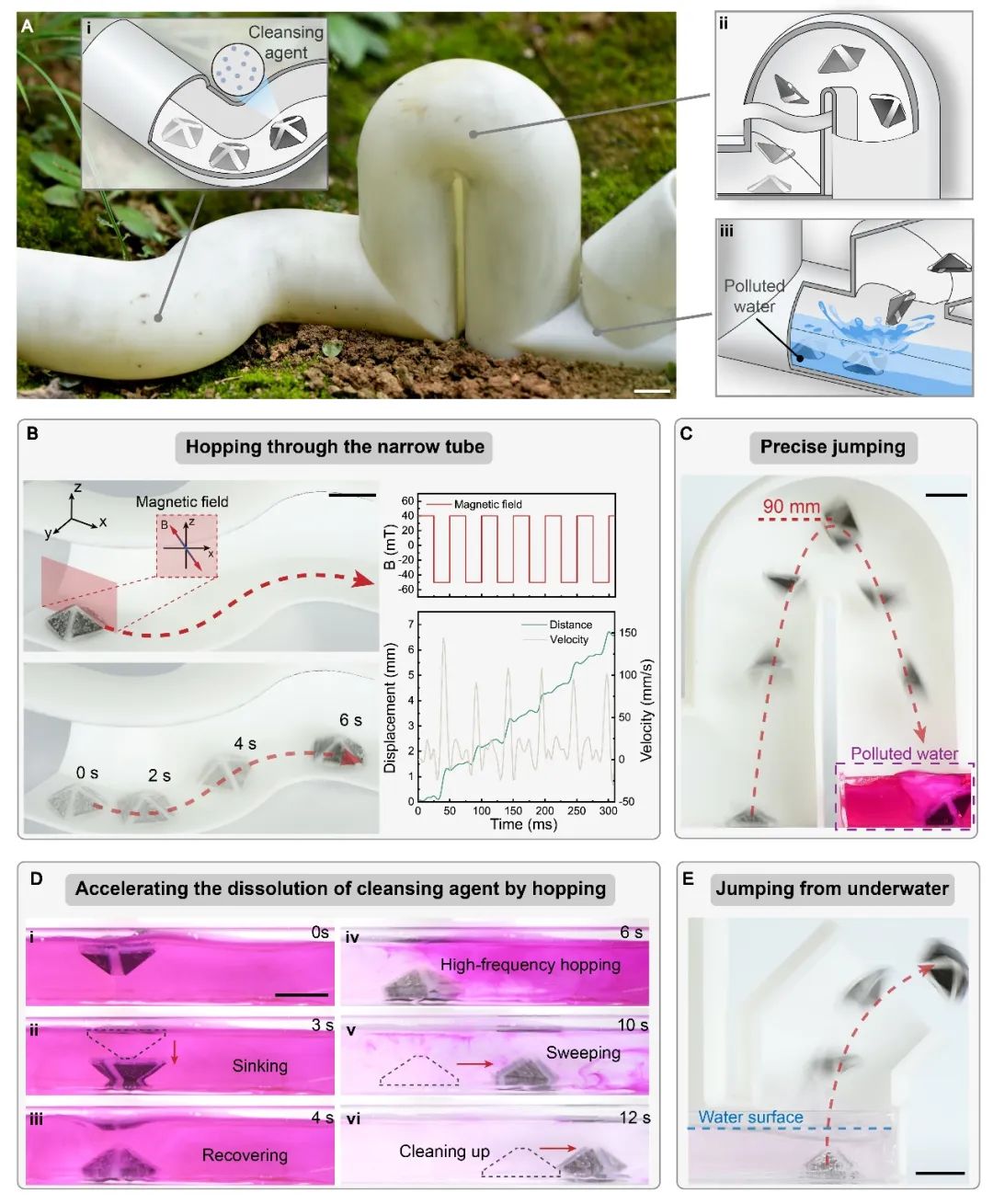
图3 双稳态弹跳机器人在封闭管道中的运动演示
总结来说,研究团队所提出的磁控双稳态弹跳机器人,凭借其创新性设计,在软体机器人技术领域中表现出了显著的性能优势和应用潜力。该机器人在弹跳高度、响应速度和控制精度等关键性能指标上均实现了对现有研究的超越。通过磁场参数调控,双稳态弹跳机器人不仅能够实现快速复位,还具备了多样化的运动模式,包括大幅度跳跃和连续性微跳,这使得它相比同类弹跳机器人具有更出色的灵活性和越障能力。此外,双稳态弹跳机器人还展现出了对于水中、封闭管道等复杂环境的良好适应性。这些能力的实现,为软体机器人的进一步研究与发展提供了新的思路和方法。
该工作是团队近期关于磁性功能器件成形制造相关研究的最新进展之一,得到了国家自然科学基金、省重点研发等项目的大力支持。近年来,磁功能器件因其响应快、无线传输的特性受到了广泛关注,团队采用折纸工艺制备了柔性磁驱动功能器件(Nano Energy, 2021, 89, 106424),实现了二维结构向三维结构的形态转变以及单功能向多功能的驱动转变。随后,团队利用磁化设计方法结合空间磁场分布建模,制备了大面积柔性触觉功能器件(ACS Nano, 2022, 16 (11), 19271-19280),依靠磁信号实现了大面积力-位置感知;团队还从理论上证明了一种全新的三维解耦磁化结构设计,并以此为基础开发了三维力解耦触觉感知功能器件(Adv. Mater.,2024, 36(11), 2310145)。团队在磁场辅助增材制造磁功能器件方面的工作(Adv. Funct. Mater., 2021, 31 (34), 2102777、Mater. Design, 2023, 112588)也为后续高性能磁功能器件的形性一体化制造奠定了良好基础。