
哈工大科研团队开发出仅重1.2克微型爬行机器人
2024-06-04 15:11:28
文章来源 中国机器人网
29日,从哈尔滨工业大学(深圳)获悉,该校机电工程与自动化学院李兵、李曜教授团队,以海豹踱步跳动为灵感,在微小型机器人领域取得重要进展,开发出仅重1.2克微型爬行机器人。相关研究成果发表在《先进科学》上。
在微型机器人领域,因驱动器尺寸限制,简化驱动形式和减少驱动器数量是一大难题。
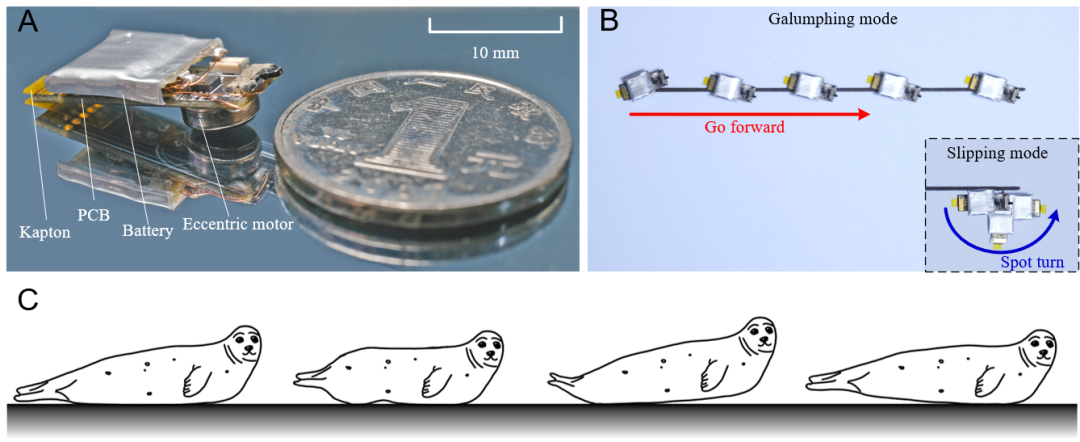
“我们的灵感来源于海豹踱步跳动方式。”李兵解释,这种方法可以让单一电机驱动的刚体机器人实现直行、弧行、转向等灵活运动。
李曜介绍:“我们引入了一项名为‘偏心力驱动的多方向运动传递’创新技术。基于该技术,机器人仅需4个零件,便可以灵活地实现复杂的运动轨迹。”
图片来源:科研团队供图
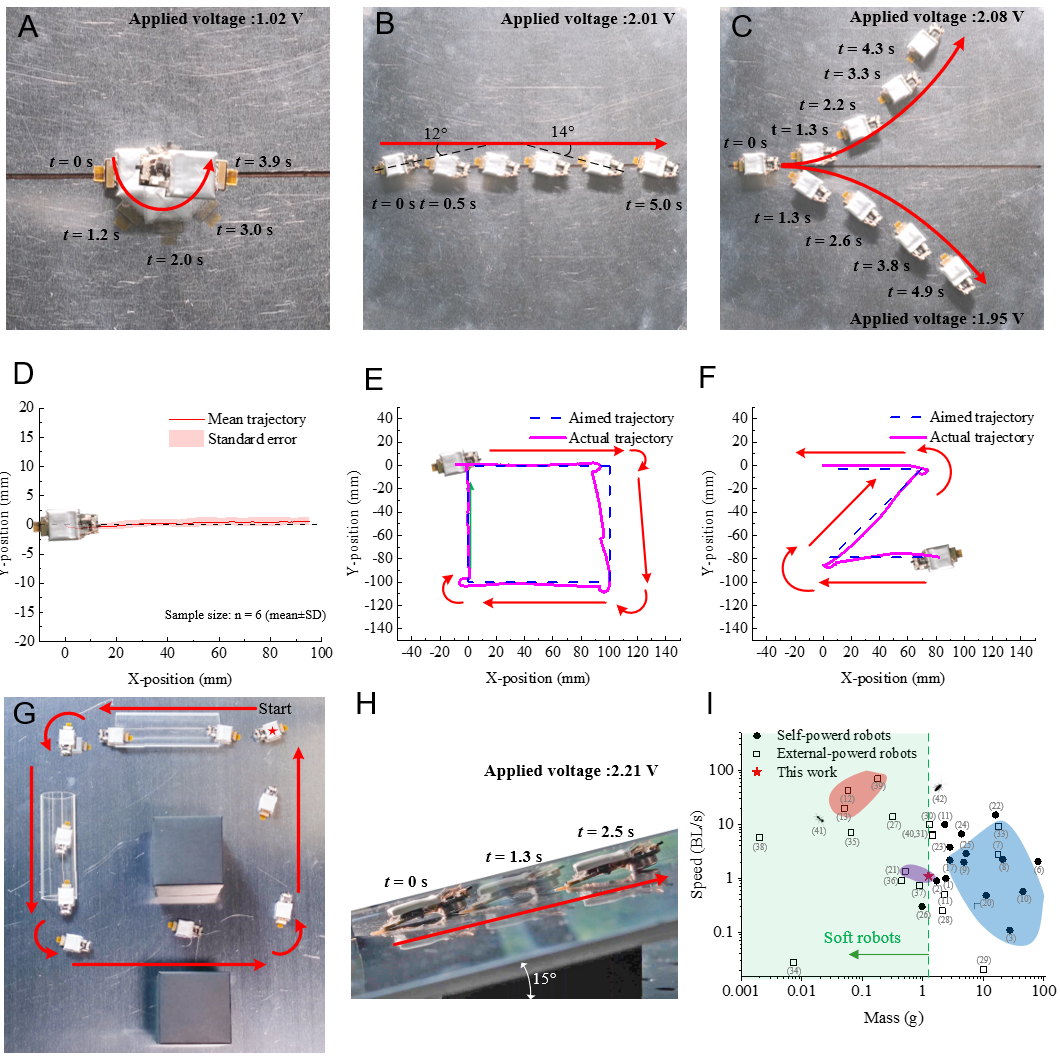
科研团队发现,微观运动的周期特性改变,直接影响机器人的宏观运动轨迹。因此科研团队通过改变驱动电压,调节电机产生偏心转速,从而控制机器人形成不同宏观轨迹。
“微型爬行机器人具有体型小、质量轻的特点,可以在管道巡检与监测、复杂仪器内部检修等工业领域发挥重要作用,也可以在公共安全检查与排险任务中展现特有优势。”李兵表示,在医学领域,该种机器人的传动技术也可以拓展微创治疗工具的使用场景。