
机器人能像打游戏升级?看欧洲顶校如何重塑机器人技能学习
文章来源 机器人大讲堂
在游戏中,角色往往都有一个“技能树”,玩家可以根据需要为角色灵活搭配、升级各种技能,使其更好地应对不同的任务和挑战。
而在机器人领域,欧洲顶尖理工大学卡尔斯鲁厄理工学院的研究人员们最近也为机器人开发了一个类似的“技能树”——MAkEable框架。
有了这个框架的加持,机器人就能更灵活地学习、进化,成长为一个“全能选手”。
那么,这个为机器人量身打造的“技能树”究竟有何过人之处呢?让我们一探究竟。
▍“可供性”:机器人技能升级的秘籍
MAkEable框架的一大特色,就是巧妙运用了“可供性”(Affordance)这一概念。“可供性”源自心理学,指的是一个物体或环境为主体提供的行为可能性。
打个比方,对人类而言,一把椅子不仅可以用来坐,还可以当作临时的梯子或支撑物。而对机器人来说,MAkEable框架就利用“可供性”来描述它与环境互动的各种可能性,比如抓取、推拉、放置等。这种表征方法可以让机器人更灵活地分析环境,自主地规划和执行各种操作,就像在“技能树”上自由搭配技能一样。
研究人员举了一个形象的例子:假设有一个抓取任务,目标是一个未知的物体。传统方法需要提前知道这个物体的种类、形状、位置等信息,才能预设抓取姿势和动作。
但MAkEable框架就简单多了,它直接分析物体的“可供性”,识别出哪些地方适合抓取,然后自主规划抓取动作。这样一来,即使是从未见过的新物体,机器人也能轻松上手,灵活操作了。
▍以“记忆”为核心,让机器人更“有心”
MAkEable框架的另一大亮点是以“记忆”为核心。
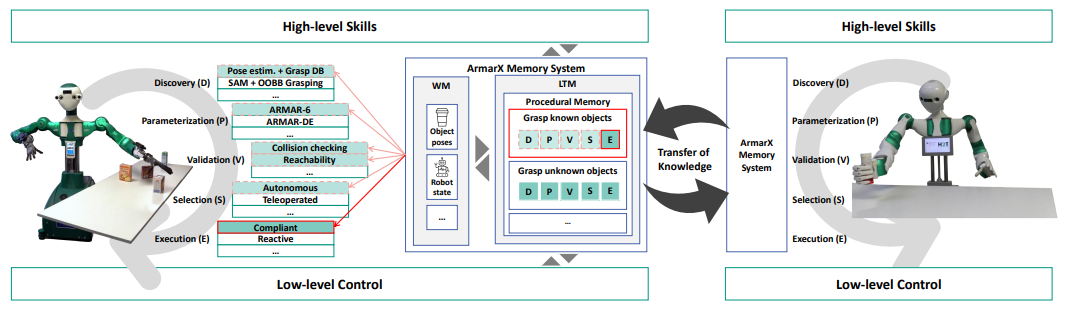
在MAkEable框架中,机器人配备了一个独特的“记忆系统”,包括“长期记忆”和“工作记忆”。通过这个系统,机器人可以将学到的技能、经验存储起来,并根据需要灵活调用,让自己变得越来越聪明。
此外,不同的机器人还可以共享彼此的“记忆”,互帮互助,共同进步。比如,一个机器人学会了开抽屉,它可以将这段经验上传到共享“记忆”中,其他机器人就可以从中学习,少走弯路。久而久之,机器人的集体智慧就会不断增长,学习能力越来越强。机器人界的“记忆”可不是闹着玩的!
▍见“机”行事:机器人通用技能的炼成
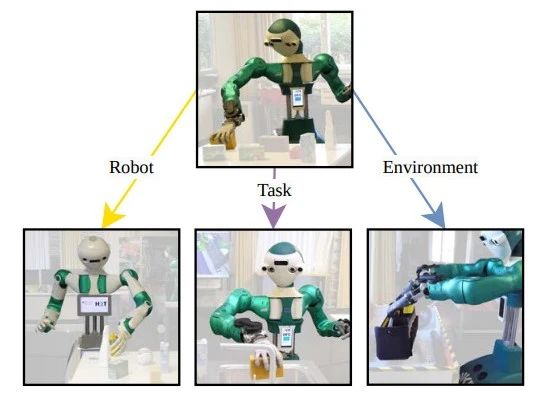
MAkEable框架的一个重要目标,就是要赋予机器人一套通用技能,使其能胜任各种任务。为此,该框架采用了一系列巧妙的策略。
首先是“机器人无关”。MAkEable的设计理念是:不同机器人的硬件可能千差万别,但核心技能应该是共通的。因此,该框架在实现机器人技能时,特意将其抽象为与具体机器人无关的描述和接口,从而实现跨平台的技能迁移和复用。
其次是模块化设计。MAkEable将复杂的操作分解为一个个小模块,每个模块都是一个独立的“技能点”,机器人可以灵活地组合、升级这些“技能点”,从而掌握更加复杂的技能。比如,抓取、推拉、放置等基本技能,就可以进一步组合为开抽屉、倒水等高级技能。
此外,MAkEable还引入了一个“中间层”。这个层位于高级任务规划和底层动作控制之间,类似于游戏中的“技能快捷键”,可以根据机器人的需求,迅速调用各种技能模块,实现灵活的任务执行。
▍“多面手”机器人的进阶之路
罗马不是一天建成的。机器人成长为“多面手”也不是一蹴而就的。MAkEable框架为机器人规划了一条清晰的进阶之路,包括5个里程碑:
其一,发现(Discover),即分析环境中可操作的物体和操作类型;
其二,参数化(Parameterize),即确定操作的关键参数,如抓取位置、力度等;
其三,验证(Validate),即在实际环境中测试操作的可行性和安全性;
其四,选择(Select),即从众多可能的操作中选出最优方案;
其五,执行(Execute),即完成实际的操作控制。
通过这5个步骤的循环往复,机器人的技能将日臻完善,逐渐从“新手”晋升为“多面手”。
在科研人员的精心“培养”下,MAkEable框架已经在机器人“ARMAR”家族中初见成效。研究者通过一系列实验,展示了“ARMAR”机器人利用MAkEable框架习得各种技能的过程:从抓取、放置、双臂配合,到开抽屉、倒水等,一个个新技能不断解锁;“ARMAR”家族的不同成员还互帮互助,传授彼此的“绝招”,共同进步。
综上所述,MAkEable框架为机器人开启了一扇通往“多面手”的大门。它巧妙地利用“可供性”来描述机器人与环境的互动,以“记忆”为核心来积累和分享经验,通过模块化、分层化的设计来实现通用技能的学习和迁移。在这个框架的支撑下,机器人有望突破固有能力的藩篱,成长为真正的“全能选手”。
当然,机器人要成为“多面手”,仅有MAkEable框架这个“技能树”还远远不够。图像识别、自然语言理解、运动规划等多个领域的进展,都是机器人实现“全能”的必要条件。此外,机器人的安全性、伦理道德、法律法规等问题,也需要在机器人走向实际应用的过程中得到重视和解决。
或许在不久的将来,纷繁复杂的现实世界对机器人而言,也不再是难题;家家户户或许都会拥有一位贴心的机器人“多面手”,它们不仅能胜任家务,还能根据需求不断“自我升级”,为我们的生活增光添彩。
游戏中的“技能树”虽然是虚构的,但MAkEable让机器人拥有“技能树”成为了可能。期待这颗小小的“种子”能在未来茁壮成长,开枝散叶,为机器人技术和人类生活带来更多的惊喜和便利。