
机械臂练成“反向双手互博”,大阪大学、伦敦大学团队远程操控机器人又一力作
文章来源 机器人大讲堂
如果说双手互搏的精髓是一心二用,让长在同一个人身上的两只手可以同时做不同的事情。那么反向双手互博就是让分别长在两个地方的手臂天衣无缝地配合着做一件事。
这是两只散养的机械臂,可以通过底盘的轮子灵活走位。而另一边,操作员左右手各拿着一个手柄在遥控着它们。机械臂并不新鲜,但是要知道通常的遥控机械臂,要么是一个操作员控制一只,要么是两只机械臂都装在同一个底盘上。而像这样各自独立却又相互配合的还真不多见:
这样设计的好处显而易见,就是可以双手拿起很长的钢管:

然后马上又拿起短得多的钢管,收放自如:
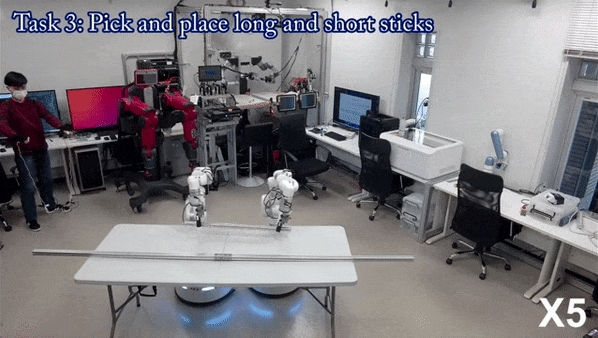
这样的设计还让机械臂可以在更大空间内工作。这就是大阪大学和伦敦大学的团队的最新成果,整个系统除了两个机械臂之外,还包括用于控制移动基座和机器人抓手的手柄,还有一个用于控制手臂姿势的运动捕捉系统。该研究以“Body Extension by Using Two Mobile Manipulators”为题发表在中国科技期刊卓越行动计划高起点新刊《Cyborg and Bionic Systems》上。

▍这东西有什么用?
远程操控机器人可以帮助我们完成那些很危险或很难的任务。比如,在福岛核电站被污染后,机器人可以收集信息和操作。还有,在事故现场,机器人甚至可以在没有专业医生的情况下执行医疗任务。最近两年,因为COVID-19疫情,人们不能随便出门,所以对远程控制机器人的研究变得更加热门,有一些医院已经用远程控制的机器人来帮助医生和病人。
以前的机器人系统需要一个带机械臂的底座和一个特殊的操作界面,但现在这个新系统只需要一个手套和一个操纵杆!这个系统可以远程控制两个独立的机械臂,而且工作空间也变得更大。用户只需要动动手指,就可以控制机械臂的姿势,而操纵杆则可以控制机械臂的移动。
但是,这里也有一些挑战,比如如何让机械臂和人的动作匹配,如何确保操作安全,还有如何远程监控机械臂的工作。幸运的是,科学家们已经找到了一些方法来解决这些问题。
▍手套、手柄、机械臂
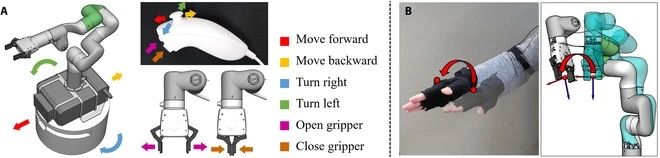
人类用户的远程操作界面使用两个基于惯性传感器IMU的运动捕捉手套来实时追踪操作员手的位置和方向。它还使用两个操纵杆,每个手一个,来控制移动基座和每个机器人的夹爪动作。
每台远程移动机械臂都由移动基座和7自由度的机械臂组成。
一个便携式电源固定在框架内部,为机械臂提供动力。
中央本地控制器安装在便携式电源的前侧。该中央控制器负责通过无线网络与每台独立机械臂和移动基座控制器进行通信和协调。
机械臂有一个夹爪作为其末端执行器。此外,在夹爪和机器人臂之间还安装了一个深度传感器,传感器上带有专门的控制器。该传感器用于视觉感知,并通过无线网络发送数据。
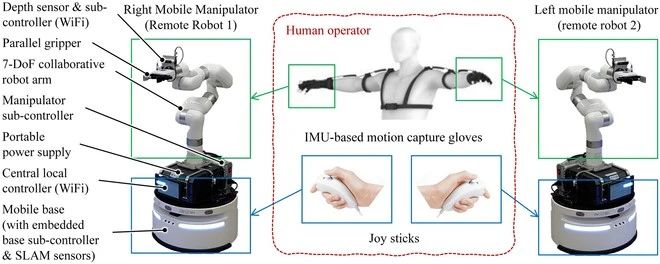
设备之间网络分为几部分,分别是将人机界面连接到无线局域网接入点的全局网络,和每个移动机械臂的独立网络。在每台机器人上,中央本地控制器通过WiFi连接到接入点,并通过LAN电缆连接到机械臂/移动基座控制器。

▍把操作员手部动作原样复制到机械臂上
运动映射是指操作员通过操纵杆来控制机械臂和夹爪的运动。手上的动作都会被那个戴在手上的感应器捕捉到,然后告诉机器人应该怎么动。
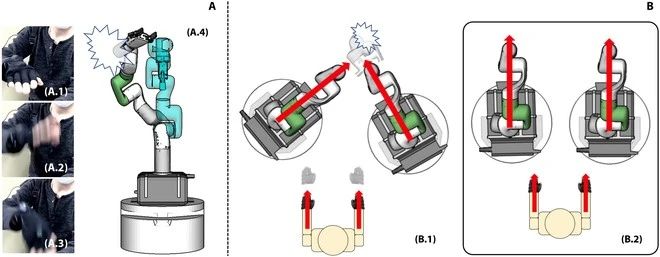
为了能更好地让机器人模仿人的动作,团队研发出了一种叫Levenberg-Marquardt的方法。这种方法能让机器人更准确地跟随做动作,就算人的动作有点小偏差,它也能很快调整过来。它还会考虑到机械臂的关节角度,避免它的运动范围过大而损坏。
不过,虽然这个方法可以能避免机械臂撞到东西,但它还不能感知到周围的障碍物。也就是说,如果机器人前面突然出现一个东西,它可能还是会撞上去。
▍还有两个难题
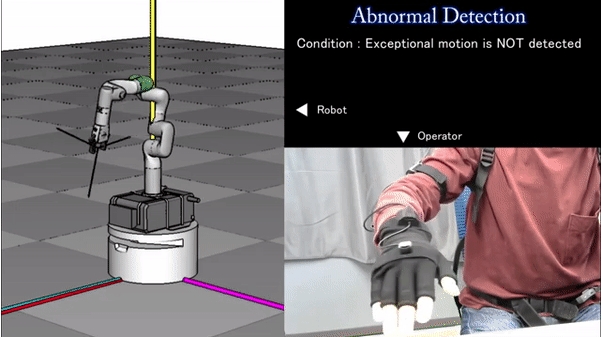
不过这里还有两个难题。一个是如果操作员手一抖或者随便动一下,那机器人可能就会跟着做出一些很危险的动作。但好在系统很聪明,如果发现某个关节的角度超出了安全范围,它就会立刻让机器人停下手头的事,直到操作员重新调整好自己的姿势。
另一个是人机配合的默契。说到人和机器人的配合,一开始的时候总是有点儿不默契。比如说,机器人的位置和人的手臂位置要是没对齐,那协调起来就容易出问题,搞不好还会撞到一起。所以在开始合作之前,操作员得先好好琢磨一下,把机器人放在一个合适的位置。
要解决这个问题也不难,系统有个功能,就是可以让操作员随时断开、重新调整机器人的位置,然后再重新开始。虽然它没有自动校准的功能,但这样断断续续的操作其实能够给人留出调整的空间。
有时候,一开始校准得不好其实也问题不大,就是可能需要多试几次才能把任务完成好。不过好在操作员可以随时调整机器人的位置,可以随时校准,这样就能顺利完成任务。
▍虽然动作比较慢,但还是挺溜
要测试机器人的运动能力,就要看它在不同方向上是否能跟着人的动作走。实验证明,它真的做到了,不管操作员怎么转,它都能跟得上。
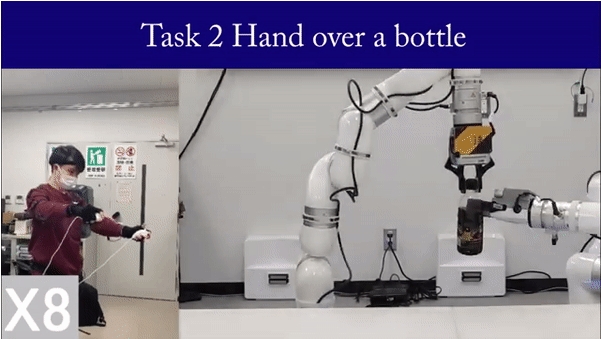
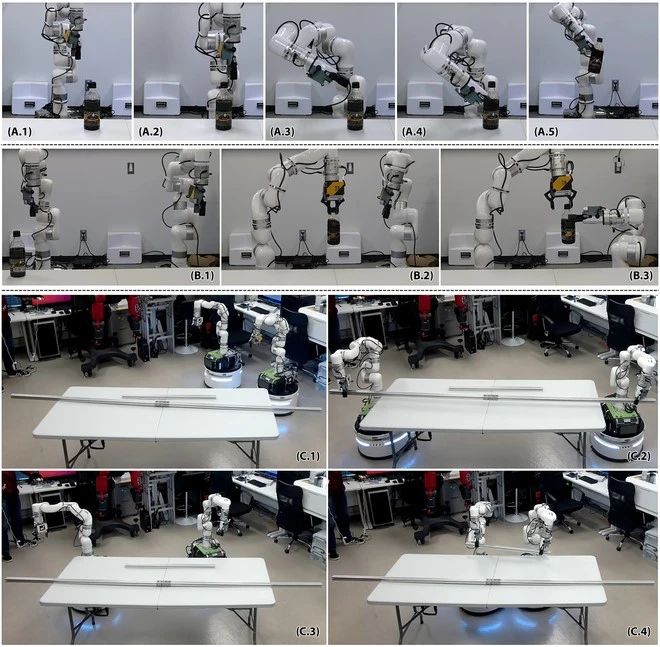
团队还尝试了各种任务,比如单手拿东西、双手交换东西,还有合作拿大大小小的物体。虽然一开始有点小问题,但最后都成功了。
完成这些任务花了一些时间,单手操作大概50秒,交换东西操作大约120秒,合作拿东西操作要根据物体大小,大概50-70秒。
▍要解决的问题
目前还有一些问题需要解决。比如,有时会出现人的胳膊与机械臂操作方向不一致的情况,这需要研究团队寻找解决方案。其次,当前的操纵杆设计对于IMU跟踪有一定的要求,需要用户水平握住操纵杆,这可能给用户带来不便。
未来,研究人员将探索如何通过高级别的控制方式,实现机械臂与操作者的同步协调运动。团队将开发更多的接口组件,以提供更精确的远程操作反馈,使得操作者能够在远离工作区域的情况下进行有效的操作。